singermeas
辛格加速度运动模型的测量函数
语法
描述
测量= singermeas (州,measurementParameters)measurementParameters.
[返回跟踪筛选器使用的测量边界(测量,界限= singermeas(___)trackingEKF,trackingUKF,trackingCKF,trackingIMM,trackingMSCEKF,或trackingGSF)的残差计算。
例子
输入参数
输出参数
更多关于
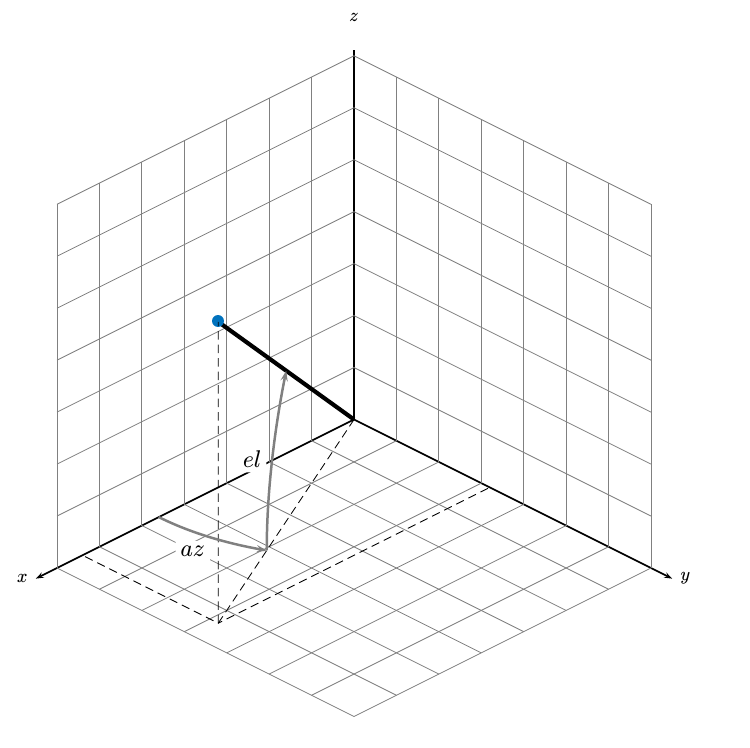
方位角和仰角定义
定义工具箱中使用的方位角和仰角。
的方位角向量的夹角是x-轴和它在xy飞机。角度是正的,从x轴向y轴。方位角在-180度和180度之间。的仰角向量和它在向量上的正交投影之间的夹角是xy飞机。当向正方向时,角度是正的z-轴xy飞机。
参考文献
[1]歌手,罗伯特A。“估计载人机动目标的最佳跟踪滤波器性能。”IEEE宇航与电子系统汇刊4(1970):473-483。
[2]布莱克曼,塞缪尔S.和罗伯特波波利。"现代跟踪系统的设计和分析"(1999)。
[3]李晓荣,维塞林·p·吉尔科夫。机动目标跟踪综述:动态模型。小目标信号与数据处理,2000,vol. 4048, pp. 212-235。国际光学与光子学学会,2000年。
扩展功能
版本历史
您也可以从以下列表中选择一个网站: