方向,位置和坐标
传感器融合和跟踪工具箱™使您能够跟踪平台的方向、位置、姿态和轨迹。一个平台通常是指您要跟踪的任何对象。
方向
方向由角位移定义。方向可以用点或帧旋转来描述。在点旋转中,坐标系是静态的,而点是移动的。在坐标系旋转中,点是静止的,而坐标系是移动的。对于给定的轴和旋转角度,点旋转和坐标系旋转定义了相反方向的等效角位移。
传感器融合和跟踪工具箱默认为帧旋转。

方向被定义为将父帧带到子帧的帧旋转。父帧的选择取决于问题空间。例如,需要操纵传感器帧以对准独立传感器的各种轴。跟踪车身框架通常用于稳定任务。地面参考帧对于在绝对意义上跟踪多个独立平台和定位平台。
传感器融合和跟踪工具箱主要支持NED(北向下)坐标框架。金宝app您还可以使用许多功能中的ENU(East-North-Up)坐标框架。


框架旋转
要使一个方向与另一个方向相关联,就必须旋转一个坐标系。该表总结了传感器融合和跟踪工具箱使用的旋转约定。三轴坐标总是按照顺序指定[X那y那Z.].
| 变量 | 欧拉角 | 象征 | 输出间隔(度) |
|---|---|---|---|
| Z. | 偏航 | ψ |
-180≤ψ<180 |
| y | 球场 | θ |
-90≤.θ≤90 |
| X | 卷 | ϕ |
-180≤ϕ<180 |
正旋转角度对应于沿轴线的正方向从原点观察时绕轴的顺时针旋转。右侧约定是等效的,其中当拇指指向旋转轴的方向时,通过右手卷曲的指示的方向表示正旋转。
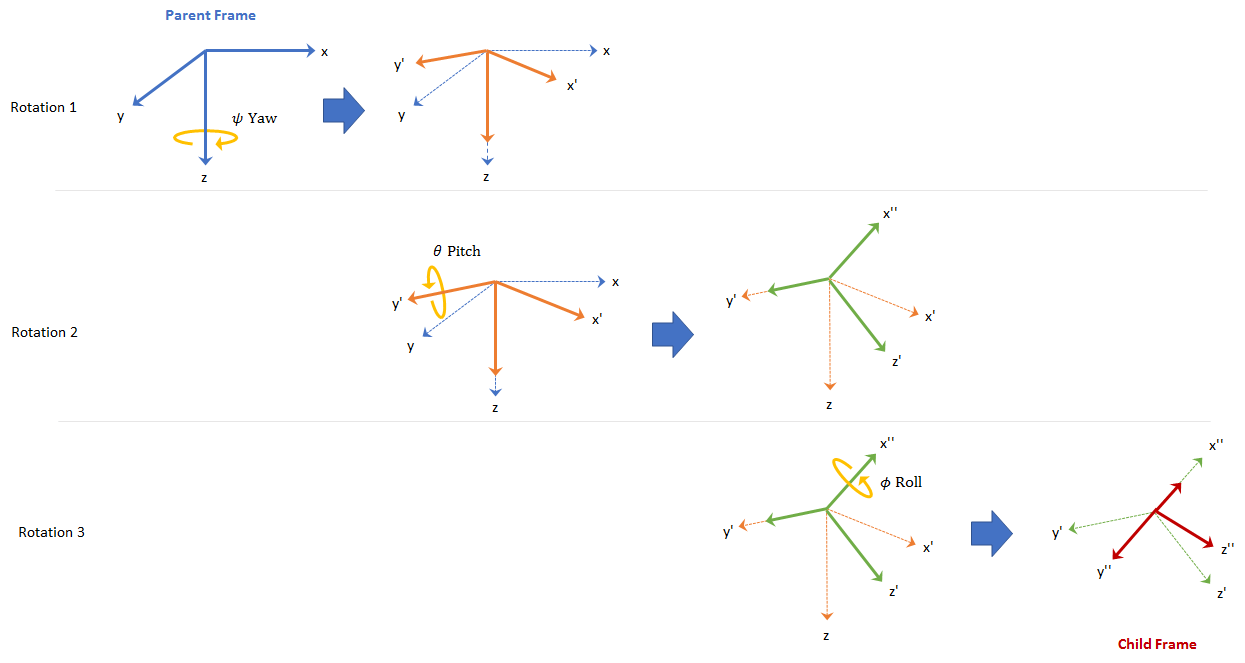
要定义三维框架旋转,您必须围绕轴顺序旋转。传感器融合和跟踪工具箱使用固有(携带帧)旋转,在每次旋转之后,在下一次旋转之前更新轴。例如,使用ZYX约定旋转一个轴:
旋转父帧关于的父帧Z.- 产生一组新的轴,(X'那y'那Z.),在哪里X- - -y-轴已更改为X'- 和y' - Xes和Z.设在保持不变。
旋转新的轴上的轴y'-axis,产生另一个新的轴,(X'',y',Z.”)。
旋转这套新的轴X'' - 到达所需的儿童框架,(X'',y'',Z.'')。
这种轮换顺序遵循[1]。将父帧中的向量转换为给定偏航,间距和滚动中的子帧中的向量所需的旋转矩阵被计算为:
对于支持基于帧的处理的功能,传感器融金宝app合和跟踪工具箱提供坐标作为一个坐标N- 3矩阵,在哪里N是时间的样本数量,三列对应于X-,y-, 和Z.-axes。以下计算将父帧旋转到子帧:
传感器融合和跟踪工具箱使高效的方向计算使用四元素数据类型。使用四元数创建旋转矩阵,使用罗马功能。
定义局部轴方向的欧拉角yaw = 20;间距= 5;卷= 10;%使用四元数类从欧拉角创建方向矩阵Q =四元数([偏航俯仰滚转],'eulerd'那'Zyx'那'框架');MyRotationMatrix =罗马特(Q,'框架');
位置
位置定义为从父坐标系原点到子坐标系原点的平移距离。例如,将本地NED坐标系作为父帧。在NED坐标系中:
原点是任意固定到地球表面的点。这使得ned坐标系当地的。
这X- XIS朝向椭球北。
这y- XIS指向椭球以东。
这Z.- 沿椭球正常(大地纬度,ρ)。

方位角和海拔
给定一个向量R.3.:
方位定义为从X- 向载体的正交投影到轴上XY.-飞机。角度是积极的X设在向y-轴。方位角在范围内以[-180,180)给出。
海拔被定义为从投影到的角度XY.-plane到载体。角度是积极的XY.- 平面到Z.-轴。高度在范围内以[-90,90]为单位给出。

姿势
要在3-D空间中完全指定一个对象,可以结合位置和方向。姿势定义为位置和方向的组合。传感器融合和跟踪工具箱在描述姿态时使用以下约定。
| 物业/领域 | 描述 | 单位 | 坐标系 |
|---|---|---|---|
| 位置 | 平台在方案中的当前位置 | m | ned或enu |
| 速度 | 情景中平台的当前速度 | 米/秒 | ned或enu |
| 加速度 | 当前平台的平台加速度 | 米/秒2 | ned或enu |
| 方向 | 平台平台的当前方向 | 单位四元数/方向矩阵 | N / A. |
| 角速度 | 情景中平台的当前角速度 | rad / s. | ned或enu |
轨迹
轨迹定义如何随时间变化。在传感器融合和跟踪工具箱中生成地面真理轨迹,使用kinematicTrajectory或waypointTrajectory。模拟跟踪多个平台,使用跟踪Cenario.。
也可以看看
参考文献
[1]。分布式交互模拟标准。应用协议。IEEE P1278.1/D16 Rev 18, May 2012。
你也可以从以下列表中选择一个网站: