跟踪模拟车辆在仿真软件中使用GNN和JPDA追踪器金宝app
这个例子展示了如何配置和利用GNN JPDA追踪器在仿真软件模拟高速公路场景®与传感器融合和跟踪工具箱™。金宝app它紧跟传感器融合使用合成雷达和视觉仿真软件中的数据金宝app(自动驾驶工具箱)。建模仿真软件的系统的主要好处是执行“假设”的简单分析和选择一个跟踪器,结果在基于需金宝app求的最佳性能。
介绍
合成雷达和视觉数据帮助我们在评估目标跟踪算法。这个例子主要关注的跟踪能力trackerGNN和trackerJPDA在仿真金宝app软件。
设置和模型的概述
这个示例的设置是一样的设置传感器融合使用合成雷达和视觉仿真软件中的数据金宝app(自动驾驶工具箱)例子,除了模拟检测连接的输入追踪器块。
![]()
追踪器
的追踪器块是一个变体子系统,可以用来GNN追踪和JPDA跟踪器之间切换。
第一个追踪器块的变体,trackerGNN,假设一个恒定的速度运动模型和扩展的卡尔曼滤波器通过设置作为默认的过滤器的初始化函数initcvekf。
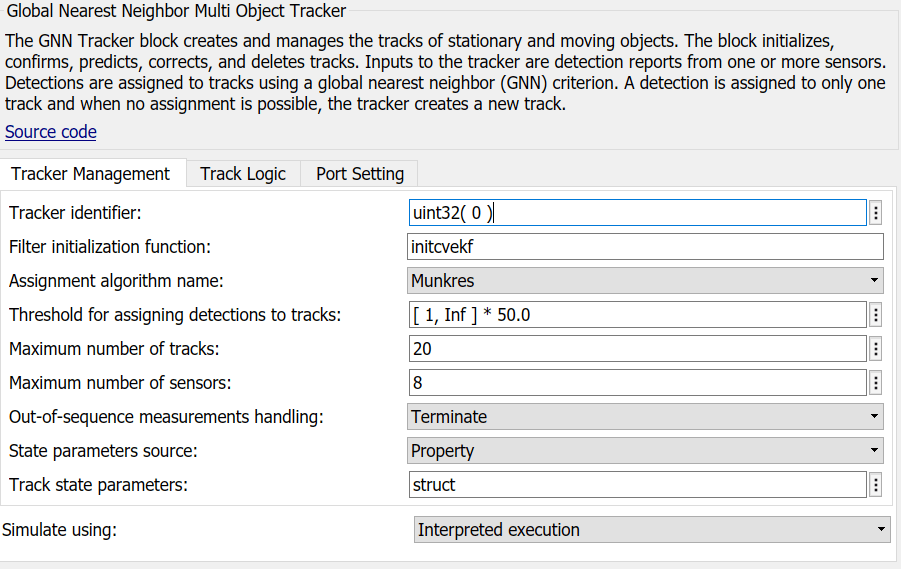
GNN跟踪器,您可以选择您自己的自定义筛选适合的运动模拟对象。你可以选择MatchPairs之间的分配算法,Munkres Jonker-Volgenant、拍卖和您自己的自定义的分配算法。您还可以指定跟踪维护逻辑历史或分数。
第二个追踪器块的变体,trackerJPDA,还假设一个恒定的速度运动模型和扩展卡尔曼滤波器由默认过滤器的初始化函数initcvekf。

与trackerJPDA,您可以定制您自己的过滤器的初始化函数和选择历史和集成跟踪逻辑。
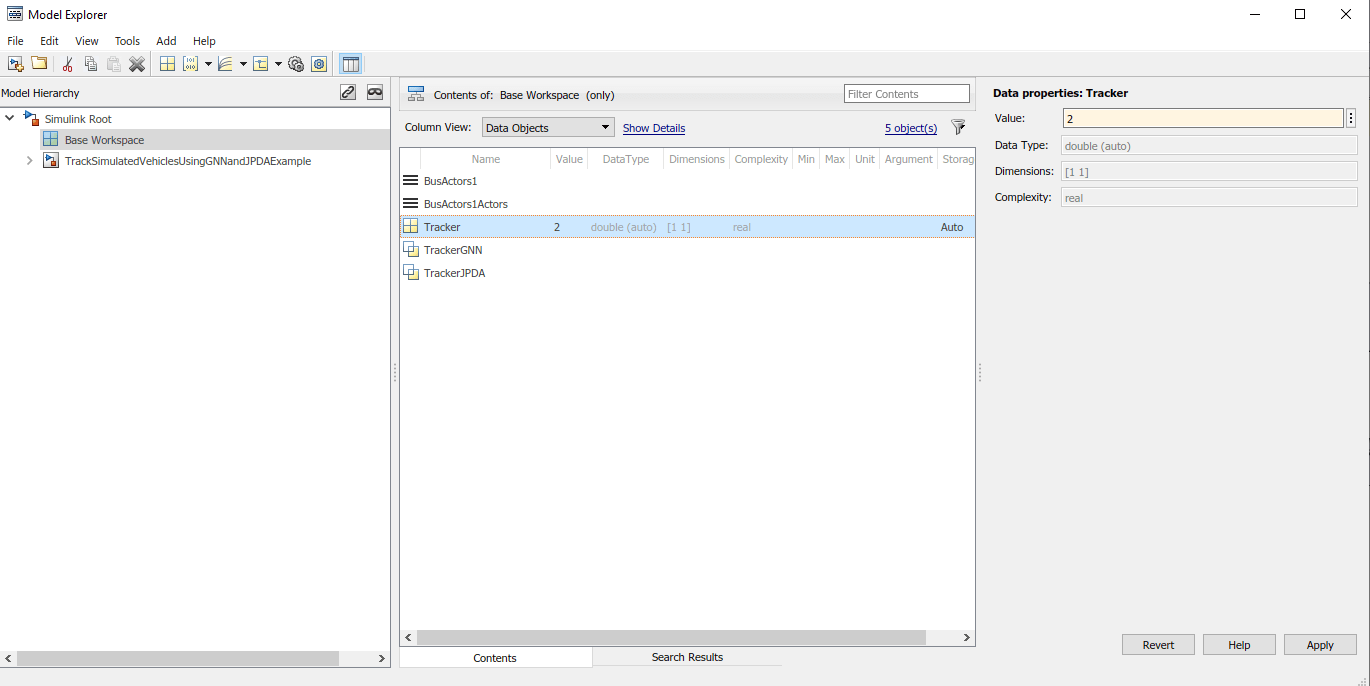
你可以选择更好的子系统通过设置条件变量的值跟踪器在基本工作空间。下面的表显示了跟踪器值对应的配置。
![]()
您还可以使用编辑和管理工作空间变量模型浏览器使用(金宝app模型)改变的价值跟踪器。
跟踪指标
跟踪指标实现使用MATLAB系统(金宝app模型)块。的代码块被定义为一个辅助类,HelperTrackMetrics。
结果
可视化结果,使用鸟瞰的范围。鸟瞰的范围是一个模型级可视化工具通过菜单工具栏提供了仿真软件模型。金宝app打开范围后,单击找到信号设置信号。然后运行仿真显示演员、愿景和雷达探测、跟踪和道路边界。下图显示了这个示例鸟瞰的范围。
在仿真金宝app软件中,您可以运行这个例子通过解释执行或代码生成。解释执行,使用MATLAB®的模型模拟块执行引擎,允许更快的启动时间,但较长的执行时间。与代码生成模型模拟了使用MATLAB的子集代码块支持代码生成可以更好的性能比解释执行。金宝app
运行模式后,你可以看到下面的结果数据。
![]()
上面的图显示了使用合成雷达和视觉数据跟踪结果trackerGNN。你可以看到跟踪维护跟踪整个跟踪地区。
![]()
上面的图显示了使用合成雷达和视觉数据跟踪结果trackerJPDA。你可以看到跟踪维护跟踪整个跟踪地区和跟踪性能优于trackerGNN有更少的错误跟踪生成。
评估跟踪性能
您可以使用跟踪指标块使用定量评估每个跟踪器的跟踪性能指标。在本例中,您查看目标跟踪的数量,数量的冗余,和错误的轨道。目标跟踪是一个跟踪与独特的目标相关联。冗余的跟踪是一个轨道与地面相关联事实对象有关联到另一个轨道。一个错误的跟踪是一个跟踪,不与任何地面实况对象相关联。下面第一个图显示了GNN跟踪器的跟踪性能结果和第二个图显示了JPDA追踪的结果。
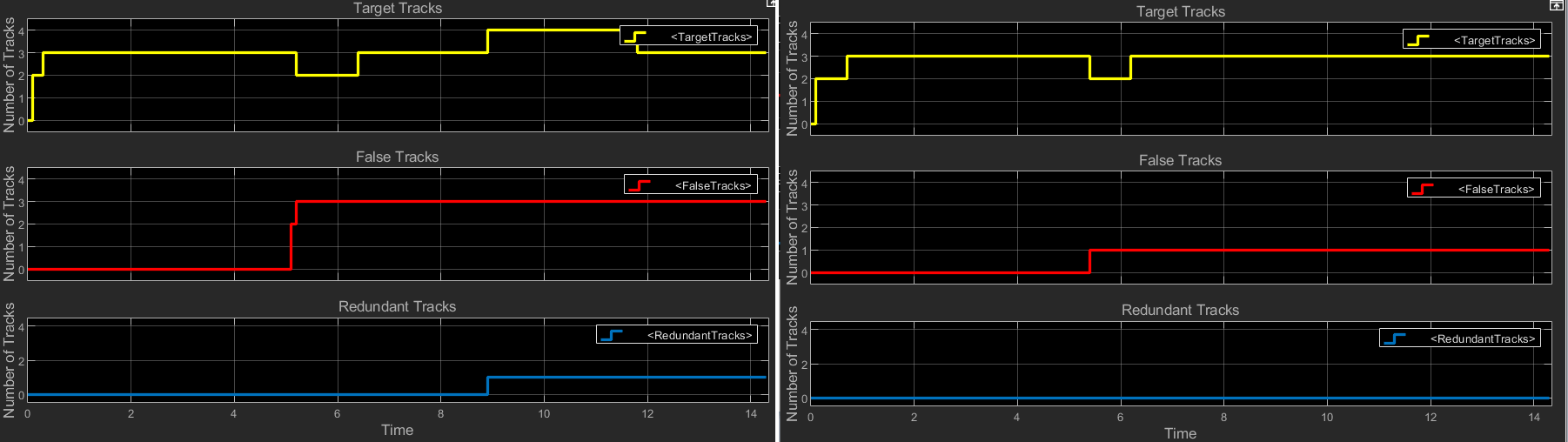
任务指标说明一个冗余的跟踪是初始化和确认trackerGNN而trackerJPDA不创建任何多余的痕迹。冗余跟踪由于不完美的聚类,生成检测属于同一目标在哪里聚集到多个集群。此外,trackerGNN和确认三个假追踪而创建的trackerJPDA确认只有一个错误的追踪。这些指标表明trackerJPDA提供了更好的跟踪性能trackerGNN。
总结
这个例子展示了如何生成一个场景,模拟传感器检测,使用这些检测跟踪移动车辆自我车辆使用trackerGNN和trackerJPDA块模型。金宝app你也见过的简单性之间的交换两个追踪器,定制这些追踪器的灵活性来适应你自己的目标跟踪要求,使用跟踪和评估跟踪结果的能力指标。