idnlarx/线性化
线性化非线性ARX模型
语法
SYS =线性化(NLSYS情况,X0)
描述
SYS =线性化(NLSYS情况,X0)针对指定的工作点线性化非线性ARX模型U0和X0。线性化基于切线线性化。有关状态定义的更多信息idnlarx模型,看到idnlarx状态的定义.
输入参数
NLSYS:idnlarx模型U0:包含模型常量输入值的矩阵。X0:模型状态值。非线性ARX模型的状态由输入和输出变量的延迟样本定义。有关非线性ARX模型状态的更多信息,请参阅getDelayInfo参考页面。
笔记
估计U0和X0根据操作点规格,使用芬多普命令
输出参数
系统是一个智能决策支持系统模型当控制系统工具箱™ 产品已安装,
系统是一个LTI对象。
例子
在仿真快照时线性化非线性ARX模型
在特定时间,围绕与仿真快照相对应的工作点线性化非线性ARX模型。
加载样本数据。
负载iddata2
从样本数据估计非线性ARX模型。
nlsys=nlarx(z2,[4 3 10],idTreePartition,“习俗”,...{“罪(y1 (2) * u1 (t)) + y₁(2)* u1 (t) + u1 (t)。* u1 (t-13) ',...‘y1(t-5)*y1(t-5)*y1(t-1)’},“nlr”,[1:5, 7 9]);
绘制阶跃输入模型的响应。
步骤(nlsys 20)
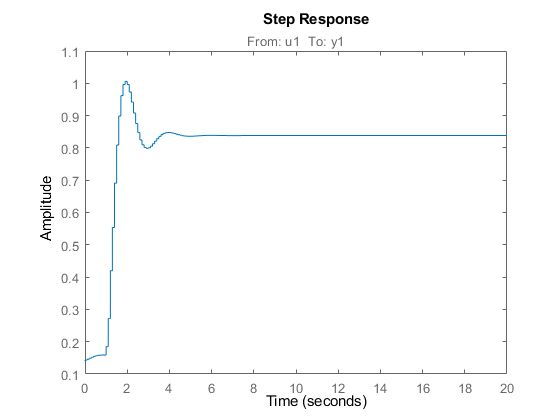
阶跃响应为稳态值0.8383在T=20秒。
计算相应的工作点T=20.
stepinput=iddata([],零(10,1);一(200,1)],nlsys.Ts);[x,u]=findop(nlsys,“快照”,20,逐步输入);
在与模型快照对应的工作点处对模型进行线性化T=20.
sys=线性化(nlsys,u,x);
验证线性模型。
施加一个小扰动delta_u对于非线性模型的稳态输入nlsys.如果线性近似值是准确的,则以下各项应匹配:
非线性模型的响应
y_nl输入是平衡水平和扰动的总和delta_u.线性模型对摄动输入的响应的和
delta_u以及产出均衡水平。
产生振幅为0.1的200样本扰动阶跃信号。
delta_=[零(10,1);0.1*1(190,1)];
对于稳态输入为1、稳态输出为0.8383的非线性系统,计算稳态响应y_nl对于扰动输入u_nl.使用平衡状态值x先前作为初始条件计算的。
U_nl = 1 + delta_u;y_nl = sim (nlsys u_nl x);
计算线性模型对扰动输入的响应,并将其添加到输出平衡水平。
y_-lin=0.8383+lsim(系统,增量);
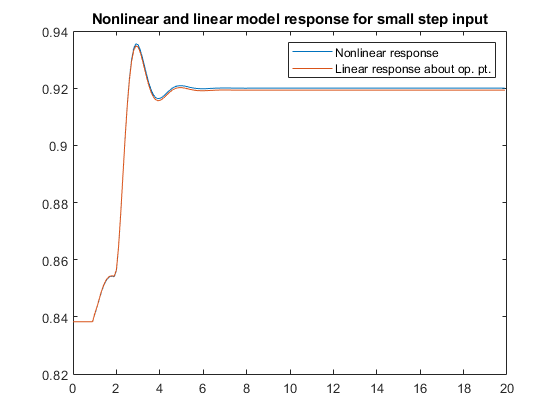
比较非线性和线性模型的响应。
时间= (0:0.1:19.9)';情节(时间、y_nl时间,y_lin)传说(“非线性响应”,“关于op.pt的线性响应。”)头衔(“小步进输入的非线性和线性模型响应”)
算法
下面的方程式控制一个系统的动力学idnlarx型号:
哪里X(T)是一个状态向量,U(T)为输入,并且Y(T)是输出。A.和B是常数矩阵。 是[Y(T),U(T)]T.
在工作点的输出为
Y* =F(X*,U*)
哪里X*及U*是运行点的状态向量和输入。
模型响应的线性近似值如下所示:
哪里
笔记
对于较大输入范围内的线性近似,使用linapp.
你也可以从以下列表中选择一个网站: