Narendra-Li基准系统:离散时间系统的非线性灰箱建模
这个例子展示了如何识别一个复杂的人工非线性离散时间系统的参数,该系统具有一个输入和一个输出。该系统最初由Narendra和Li在文章中提出并讨论
K.S.Narendra和S.-M.Li.“控制系统中的神经网络”,《神经网络的数学观点》(P.Smolensky,M.C.Mozer和D.E.Rumelhard编辑),第11章,第347-394页,美国新泽西州希尔斯代尔的劳伦斯·厄尔鲍姆协会,1996年。
并在众多离散时间辨识实例中得到了考虑。
离散时间Narendra-Li基准系统
Narendra-Li系统的离散时间方程为:
x1(t+Ts)=(x1(t)/(1+x1(t)^2)+p(1))*sin(x2(t))x2(t)=x2(t)*cos(x2(t))+x1(t)*exp(-(x1(t)^2+x2(t)^2)/p(2))+u(t)^3/(1+u(t)^2+p(3)*cos(x1(t)+x2(t))
y(t)=x1(t)/(1+p(4)*sin(x2(t))+p(5)*sin(x1(t)))
其中,具有输入(t)和输出(t)信号的输入(t)和输出(p)元素是具有输入(t)和输出(p)信号的状态。
IDNL灰色离散时间Narendra-Li模型
从IDNLGREY模型文件的角度来看,连续时间系统和离散时间系统之间没有区别。因此,Narendra Li模型文件必须返回状态更新向量dx和输出y,并且应将t(时间)、x(状态向量)、u(输入)、p(参数)和varargin作为输入参数:
函数[dx,y]=narendrali_m(t,x,u,p,varargin)%narendrali_m是一个离散时间的narendrali基准系统。
%输出方程y=x(1)/(1+p(4)*sin(x(2))+x(2)/(1+p(5)*sin(x(1));
%状态方程。dx=[(x(1)/(1+x(1)^2)+p(1))*sin(x(2));…%状态1.x(2)*cos(x(2))+x(1)*exp(-(x(1)^2+x(2)^2)/p(2))…%状态2.+u(1)^3/(1+u(1)^2+p(3)*cos(1)+x(2))…];
请注意,我们在这里选择将所有5个参数压缩为一个参数向量,其中i:th元素以通常的MATLAB方式引用,即通过p(i)。
以该模型文件为基础,我们接下来创建一个反映建模情况的IDNLGREY对象。这里值得强调的是,模型的离散性是通过Ts(=1秒)的正值指定的。还要注意的是,参数只包含一个元素,一个5乘1的参数向量,并且SETPAR用于指定该向量的所有分量都是严格正的。
文件名=“narendrali_m”;%描述模型结构的文件。顺序=[12];%型号订单[ny nu nx]。参数={[1.05;7.00;0.52;0.52;0.48]};%真实初始参数(向量)。初始状态=零(2,1);%初始状态的初始值。Ts=1;%Ts=1s的时间离散系统。nlgr=IDNLGRY(文件名、顺序、参数、初始状态、Ts、,“姓名”,...“离散时间Narendra-Li基准系统”,...“时间单位”,'s');nlgr=setpar(nlgr,“最低限度”,{eps(0)*one(5,1)};
输入的Narendra Li模型结构的摘要可通过当前命令获得:
出席(nlgr);
nlgr=由narendrali_m(MATLAB文件)定义的离散时间非线性灰箱模型:x(t+Ts)=F(t,u(t),x(t),p1)y(t)=H(t,u(t),x(t),p1)+e(t),具有1个输入、2个状态、1个输出和5个自由参数(共5个)。输入:u(1)(t)状态:初始值x(1)x1(t)xinit@exp1[Inf,Inf]x(2)x2(t)中的0(固定)xinit@exp10(固定)在[-Inf,Inf]输出中:y(1)(t)参数:值p1(1)p1 1.05(估计)in]0,Inf]p1(2)7(估计)in]0,Inf]p1(3)0.52(估计)in]0,Inf]p1(4)0.52(估计)in]0,Inf]p1(5)0.48(估计)在[0,Inf]Name:离散时间Narendra Li基准测试系统采样时间:1秒状态:由直接构造或转换创建。未估计。有关详细信息,请参阅模型的“报告”属性。
输入输出数据
有两个输入-输出数据记录,每个记录有300个样本,一个用于估计,一个用于验证。用于这两个记录的输入向量相同,被选为两个正弦波的总和:
u(t)=sin(2*pi*t/10)+sin(2*pi*t/25)
对于t=0,1,…,299秒,我们创建两个不同的IDDATA对象来保存这两个数据记录,ze用于估计,zv用于验证。
加载(完整文件)(matlabroot,“工具箱”,“识别”,“iddemos”,“数据”,“narendralidata”)); ze=iddata(y1,u,Ts,“启动”, 0,“姓名”,“Narendra Li估算数据”,...“姓名”,“泽”);zv=iddata(y2,u,Ts,“启动”, 0,“姓名”,“Narendra Li验证数据”,...“姓名”,“zv”);
用于估算的输入输出数据显示在绘图窗口中。
身材(“姓名”,ze.姓名);地块(ze);
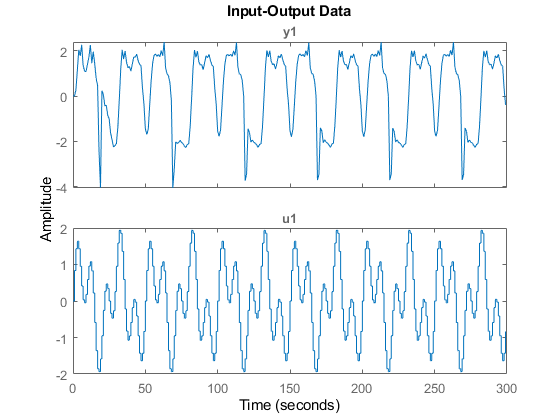
图1:来自Narendra Li基准系统的输入输出数据。
初始Narendra-Li模型的性能
现在让我们使用COMPARE来研究初始Narendra-Li模型的性能。模拟和测量的输出泽和零电压已生成,并适合泽默认情况下显示。使用绘图关联菜单将数据切换到实验零电压. 这两个数据集的拟合度都没有那么差(约74%)。这里我们应该指出,默认情况下比较估计初始状态向量,在这种情况下,一个初始状态向量用于泽还有一个是给你的零电压.
比较(合并(ze,zv),nlgr);

图2:初始Narendra-Li模型的真实输出和模拟输出之间的比较。
%%4%通过观察通过PE获得的预测误差,我们认识到%初始Narendra-Li模型显示出一些系统性和周期性差异%与真实输出相比。pe(合并(ze,zv),nlgr);

图3:使用初始Narendra-Li模型获得的预测误差。使用上下文菜单在实验之间切换。
参数估计
为了减少系统差异,我们使用NLGRYEST估计了Narendra-Li模型结构的所有5个参数。仅基于估计数据集ze进行估计。
opt=nlgreyestOptions(“显示”,“开”); nlgr=NLGRYEST(ze、nlgr、opt);

估计Narendra-Li模型的性能
再次使用COMPARE来研究估计模型的性能,但这次我们使用模型内部存储的初始状态向量([0;0]用于两个实验),而不进行任何初始状态向量估计。
clf opt=比较选项(“初始条件”,“我是); 比较(合并(ze,zv),nlgr,opt);

图4:估计的Narendra-Li模型的真实输出和模拟输出之间的比较。
估计后的改善是显著的,通过预测误差图可以最好地说明这一点:
图:pe(合并(ze,zv),nlgr);

图5:使用估计的Narendra-Li模型获得的预测误差。
估算的Narendra-Li模型的建模能力也通过通过REDIS提供的相关分析得到确认:
身材(“姓名”,[nlgr.Name“:估计模型的残差”])(zv,nlgr);;

图6:使用估计的Narendra-Li模型获得的残差。
事实上,获得的模型参数也非常接近用于生成真实模型输出的参数:
disp(“真实估计参数向量”);ptrue=[1;8;0.5;0.5;0.5];fprintf(“%1.4f%1.4f\n”,[ptrue';getpvec(nlgr');
真实估计参数向量1.0000 1.0000 8.0000 8.0082 0.5000 0.5003 0.5000 0.4988 0.5000 0.5018
接下来通过当前命令提供一些额外的模型质量结果(损失函数、Akaike的FPE和模型参数的估计标准偏差):
出席(nlgr);
nlgr=由“narendrali_m”(MATLAB文件)定义的离散时间非线性灰箱模型:x(t+Ts)=F(t,u(t),x(t),p1)y(t)=H(t,u(t),x(t),p1)+e(t),具有1个输入、2个状态、1个输出和5个自由参数(共5个)。输入:u(1)u1(t)状态:初始值x(1)x1(t)xinit@exp1[Inf,Inf]x(2)x2(t)中的0(固定)xinit@exp1[Inf]输出中的0(固定):y(1)y1(t)参数:值标准偏差p1(1)p1 0.99993 0.0117615(估计)in]0,Inf]p1(2)8.00821 0.885988(估计)in]0,Inf]p1(3)0.500319 0.0313092(估计)in]0,Inf]p1(4)0.498842 0.264806(估计值)in]0,Inf]p1(5)0.501761 0.30998(估计值)in]0,Inf]Name:离散时间Narendra Li基准系统采样时间:1秒状态:终止条件:参数变化小于指定公差。。迭代次数:16次,函数评估次数:17次,使用解算器估算:FixedStepDiscrete;搜索:时域数据“Narendra Li估计数据”上的lsqnonlin。适合估算数据:99.44%FPE:9.23e-05,MSE:8.927e-05模型“报告”属性中的更多信息。
对于连续时间输入输出系统,也可以对离散时间输入输出系统使用STEP。让我们对两个不同的步骤级别(1和2)执行此操作:
身材(“姓名”,[nlgr.Name“:估计模型的阶跃响应”]);t=(-5:50);(nlgr,“b”,t,stepDataOptions(“阶跃振幅”,1);行(t,步骤(nlgr,t,步骤数据选项(“阶跃振幅”,2)),“颜色”,“g”); 网格在…上;传奇('0 -> 1','0 -> 2',“位置”,“西北”);

图7:使用估计的Narendra-Li模型获得阶跃响应。
通过比较估计的IDNLGREY-Narendra-Li模型与一些基本线性模型的性能,我们总结了这个示例。后一种模型的拟合度大大低于估计的IDNLGREY模型的拟合度。
nk=延迟(ze);arx22=arx(ze[2 nk]);%二阶线性ARX模型。arx33=arx(ze,[3 nk]);%三阶线性ARX模型。arx44=arx(ze[4 nk]);%四阶线性ARX模型。oe22=oe(ze,[2 nk]);%二阶线性OE模型。oe33=oe(泽,[3 nk]);%三阶线性OE模型。oe44=oe(ze,[4 nk]);%四阶线性OE模型。clf fig=gcf;Pos=图中的位置;图位置=[位置(1:2)*0.7,位置(3)*1.3,位置(4)*1.3];比较(zv,nlgr,“b”,arx22,“m-”,arx33,m:',arx44,“我——”,...oe22,“g-”,oe33,g:',oe44,“g——”);

图8:许多估计的Narendra-Li模型的真实输出和模拟输出之间的比较。
结论
在本例中,我们使用了一个虚拟的离散时间Narendra Li基准系统来说明执行离散时间IDNLGREY建模的基础。
您还可以从以下列表中选择网站: