主要内容
灰色矩形模型估计
估计线性和非线性微分、差分和状态空间方程的系数
功能
感动的 |
线性灰箱模型估计 |
nlgreyest |
估计非线性灰箱模型参数 |
idgrey |
具有可识别参数的线性ODE(灰箱模型) |
idnlgrey |
非线性灰色矩形模型 |
pem |
优化线性和非线性模型的预测误差最小化 |
findstates |
估计模型的初始状态 |
初始化 |
设置或随机化初始参数值 |
getinit |
的值idnlgrey模型初始状态 |
setinit |
设定初始状态idnlgrey模型对象 |
getpar |
的参数值和属性idnlgrey模型参数 |
setpar |
设置的初始参数值idnlgrey模型对象 |
getpvec |
获取模型参数和相关的不确定性数据 |
setpvec |
修改模型参数值 |
sim卡 |
模拟辨识模型的响应 |
greyestOptions |
选项设置感动的 |
nlgreyestOptions |
选项设置nlgreyest |
findstatesOptions |
选项设置findstates |
simOptions |
选项设置sim卡 |
例子和如何做
如何在命令行定义和估计线性灰盒模型。
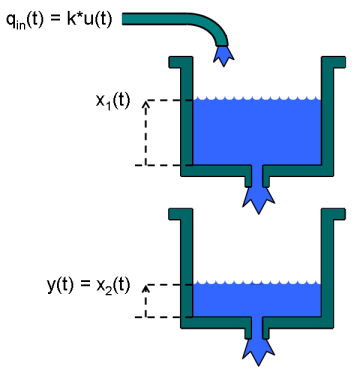
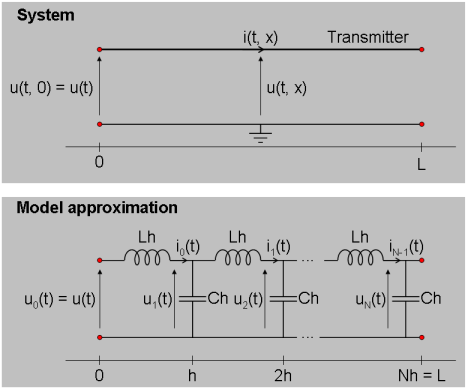
这个例子说明了如何估算热棒系统的连续时间灰箱模型的导热系数和传热系数。
这个示例展示了如何在知道度量噪声的方差时创建单输入和单输出灰盒模型结构。
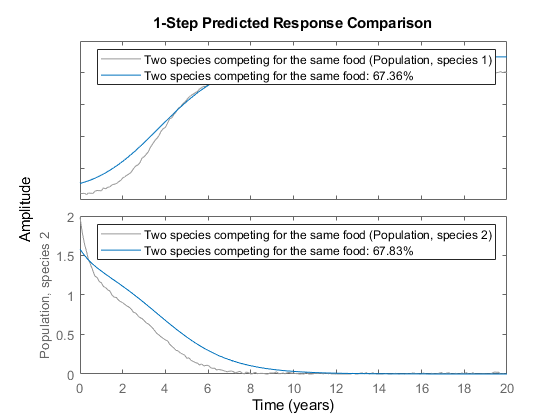
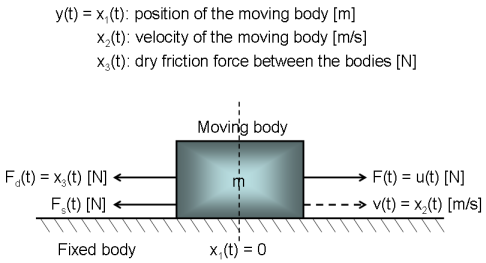
使用线性和非线性灰箱模型估计模型参数。
这个例子展示了如何估计一个由极点、零和增益参数化的模型。
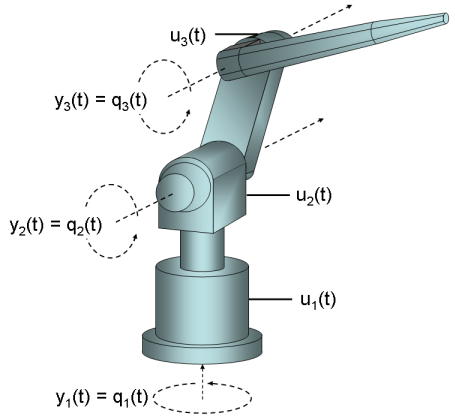
如何在命令行定义和估计非线性灰盒模型。
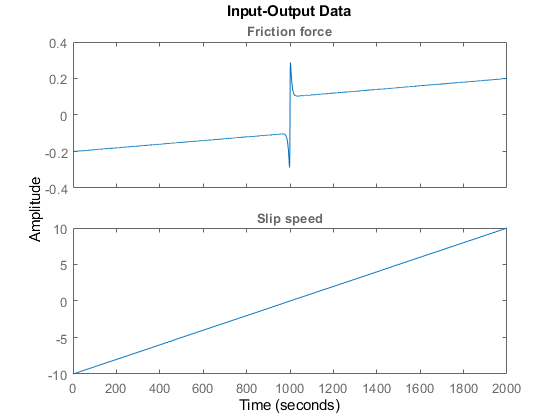
这个例子展示了如何编写非线性灰箱模型的ODE文件,如MATLAB和C MEX文件。
结构参数化允许您通过将这些参数设置为特定值来从估计中排除特定参数。
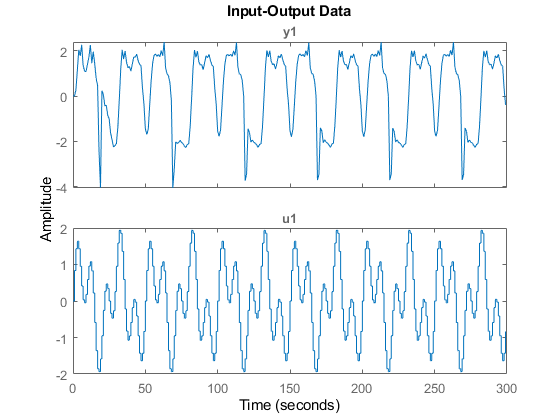
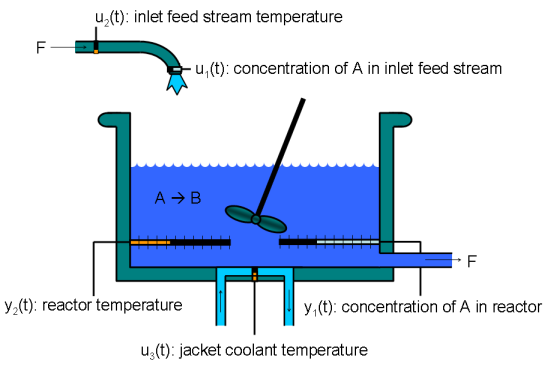
这个例子展示了如何在用户定义的模型结构中估计参数。
概念
支持的灰盒模型的类金宝app型。
用于估计灰盒模型的金宝app支持数据类型。
之间的区别idgrey和idnlgrey用于表示灰盒模型对象的模型对象。
在给定输入和噪声信号的情况下,利用辨识出的线性模型对系统输出进行仿真和预测。
配置参数估计时损耗最小的功能。在评估之后,使用模型质量度量来评估识别模型的质量。
的评估报告包含有关用于模型估计的结果和选项的信息。
正则化是一种技术,用于指定对模型灵活性的约束,从而减少估计参数值的不确定性。
特色的例子
你也可以从以下列表中选择一个网站: