主要内容
坐标系统激光雷达的工具箱
激光雷达工具箱™使用这些坐标系统:
词-一种固定的、通用的坐标系统,其中存在物理传感器。
传感器-特定于每个特定的传感器,如激光雷达传感器或相机。
空间-特定于由相机捕获的图像。空间坐标中的位置用像素表示。
图案-棋盘图案坐标系统,通常用于校准摄像机传感器。
世界坐标系统
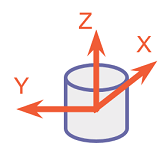
世界坐标系是一个固定的通用系统,作为所有传感器的绝对参考。激光雷达工具箱使用在ISO 8855中定义的右手笛卡尔世界坐标系,其中的正数z-轴从地面向上指向。单位是米。
传感器坐标系
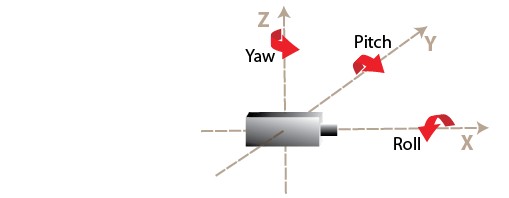
激光雷达工具箱中的传感器坐标系统锚定在特定的传感器上,如激光雷达传感器或摄像机。每个传感器的位置包含其坐标系统的原点。例如,相机的光学中心通常作为相机坐标系的原点。传感器坐标系中的点遵循以下轴线约定:
的x-轴指向从传感器。
的y-轴指向左边,当面对向前看。
的z-轴从地面向上指向以保持右手坐标系。
传感器的偏航、俯仰和滚转角度遵循ISO规范。这些角度是顺时针正的当看正向z-,y- - - - - -,x分别相互重合。
空间坐标系统
空间坐标使您能够以比像素坐标更大的粒度在图像中指定位置。在像素坐标系统中,每个像素被视为一个离散单元,由一个整数行和列对唯一标识,如(3,4)。在空间坐标系中,图像中的位置以部分像素表示,如(3.3,4.7)。
 有关空间坐标系的更多信息,请参见空间坐标.
有关空间坐标系的更多信息,请参见空间坐标.
模式坐标系统
估计单目摄像机传感器参数的一种常用技术是使用标定模式(如棋盘)的多幅图像标定摄像机。在图案坐标系中,(XP,YP),XP-轴指向右边和YP设在点下来。棋盘原点是棋盘左上角方块的右下角。

每个方格角代表坐标系中的一个点。例如,原点右边的角是(1,0),原点下面的角是(0,1)。有关使用棋盘模式校准摄像机的更多信息,请参见校准单眼相机(自动驾驶工具箱).
相关话题
你也可以从以下列表中选择一个网站: