inflate
Inflate each occupied grid location
Description
inflate(inflates each occupied position by the radius given in number of cells.map,gridradius,'grid')
Examples
Create and Modify Binary Occupancy Grid
Create a 10m x 10m empty map.
map = binaryOccupancyMap(10,10,10);
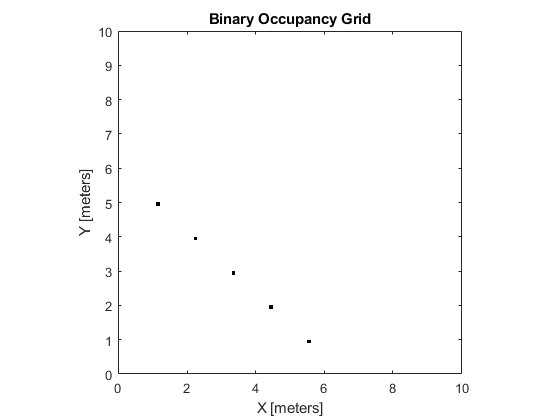
Set occupancy of world locations and show map.
x = [1.2; 2.3; 3.4; 4.5; 5.6]; y = [5.0; 4.0; 3.0; 2.0; 1.0]; setOccupancy(map, [x y], ones(5,1)) figure show(map)
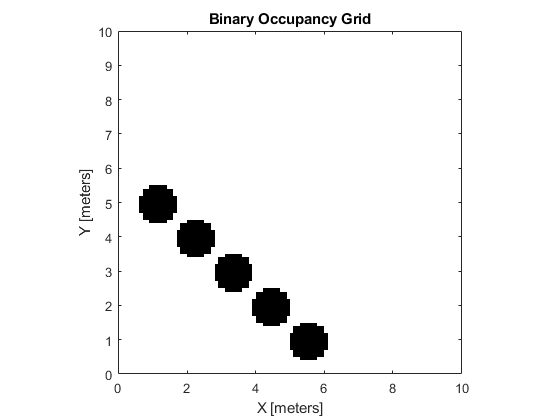
Inflate occupied locations by a given radius.
inflate(map, 0.5) figure show(map)
Get grid locations from world locations.
ij = world2grid(map, [x y]);
Set grid locations to free locations.
setOccupancy(map, ij, zeros(5,1),'grid') figure show(map)

Input Arguments
Extended Capabilities
Version History
You can also select a web site from the following list:
Americas
- América Latina(Español)
- Canada(English)
- United States(English)
Europe
- Belgium(English)
- Denmark(English)
- Deutschland(Deutsch)
- España(Español)
- Finland(English)
- France(Français)
- Ireland(English)
- Italia(Italiano)
- Luxembourg(English)
- Netherlands(English)
- Norway(English)
- Österreich(Deutsch)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)