主要内容
raycast
沿着射线计算单元格指数
描述
例子
让网格细胞沿着射线
使用raycast方法为射线遍历的所有单元格生成单元格索引。
创建一个空映射。一个低分辨率的地图被用来说明受影响的网格位置。
地图= occupancyMap (10 10 1);显示(图)

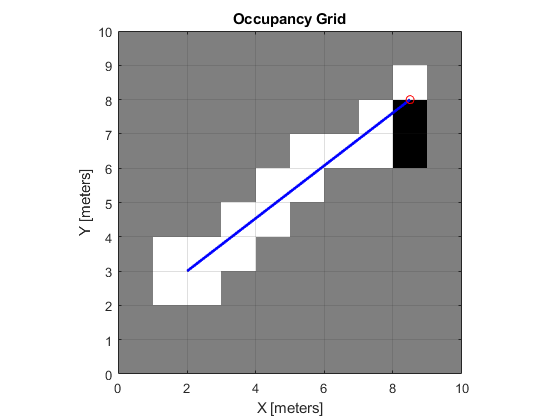
从中得到一条射线的中点和端点的网格指数3 [2]来8.5 [8].为这些网格指数设置占用值。中点被视为开放空间。用被占用的观测值更新端点。
P1 = [2 3];P2 = [8.5 8];[endPts, midPts] = raycast(地图,p1, p2);setOccupancy(地图,midPts, 0(长度(midPts), 1),“网格”);setOccupancy(地图、endPts(长度(endPts), 1),“网格”);
在地图上绘制原始射线。一行所接触的每个网格单元格都被更新。起始点重叠多个单元格,直线接触某些单元格的边缘,但所有单元格仍然被更新。
显示(map)在情节([p1 (1) p2(1)]、[p1 (2) p2 (2)),“- b”,“线宽”, 2)情节(p2 (1), p2 (2),”或“网格)在
输入参数
输出参数
介绍了R2019b
你也可以从以下列表中选择一个网站: