计划
计划两个国家之间的路径
描述
路径=计划(规划师,startState,goalState)路径从一开始状态到目标状态。
(同样的回报路径,solutionInfo]=计划(规划师,startState,goalState)solInfo包含路径规划的解决方案信息。
例子
计划两个国家之间的路径
创建一个状态空间。
党卫军= stateSpaceSE2;
创建一个occupanyMap使用创建的状态空间的状态验证器。
sv = validatorOccupancyMap (ss);
从一个例子创建一个occupany地图地图和地图分辨率设置为10细胞/米。
负载exampleMaps地图= occupancyMap (simpleMap 10);sv。地图=地图;
设置验证验证器的距离。
sv。ValidationDistance = 0.01;
更新状态空间边界地图限制一样。
ss.StateBounds = [map.XWorldLimits; map.YWorldLimits;[-ππ]];
创建路径规划和增加最大连接距离。
规划师= plannerRRT (ss、sv);计划。MaxConnectionDistance = 0.3;
设定开始和目标状态。
开始= (0.5,0.5,0);目标= (2.5,0.2,0);
计划路径和默认设置。
rng (100“旋风”);%的可重复的结果[pthObj, solnInfo] =计划(计划,开始,目标);
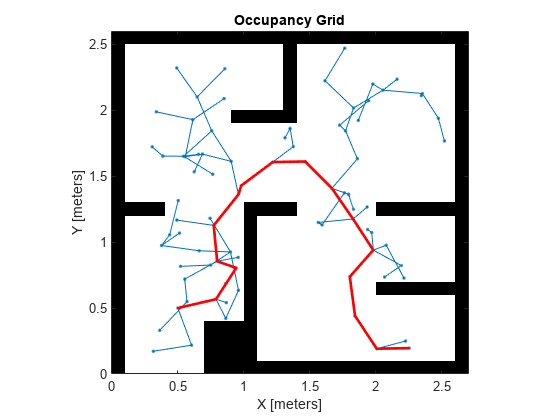
可视化结果。
显示(map)在情节(solnInfo.TreeData (: 1) solnInfo.TreeData (:, 2),“。”);%树扩张情节(pthObj.States (: 1) pthObj.States (:, 2),的r -,“线宽”,2)%画出路径