主要内容
transformScan
基于相对位姿的激光扫描变换
描述
[中指定的激光扫描transRanges,transAngles) = transformScan (范围,角,relPose)范围和角通过使用指定的相对姿态,relPose.
例子
改变激光扫描
创建一个lidarScan对象。指定范围和角度为向量。
refRanges = 5 * 1 (1300);refAngles = linspace(-π/ 2π/ 2300);refScan = lidarScan (refRanges refAngles);
翻译激光扫描(x, y)偏置的(0.5, 0.2).
transformedScan = transformScan(refScan,[0.5 0.2 0]);
将激光扫描旋转20度。
rotateScan = transformScan (refScan(0, 0,函数(20)]);
使用扫描匹配转换扫描
使用matchScans函数查找两个激光雷达扫描之间的相对变换。然后,将第二次扫描转换为第一次扫描的坐标系。
加载一对激光雷达扫描作为一对lidarScan对象。它们是同一场景的两个扫描,只是相对姿势发生了变化。
负载tb3_scanPair.mat情节(s1)在情节(s2)从
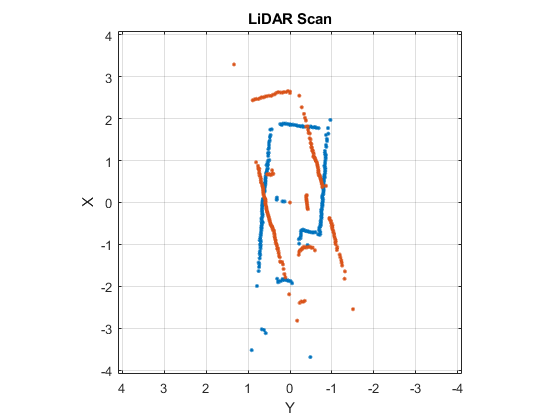
相对姿态由里程传感器估计,并作为变量提供,initGuess,因为(x yθ).
disp (initGuess)
-0.7000 0.1500 -0.3254
使用扫描匹配来找到两个激光扫描之间的相对位姿,并指定位姿的初始猜想。
构成= matchScans (s1, s2“InitialPose”, initGuess);disp(构成)
-0.7213 0.1160 -0.2854
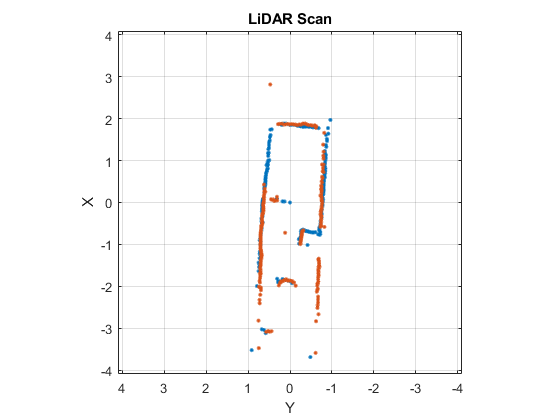
将第二次扫描转换为第一次扫描的坐标框架。绘制两个扫描图,看看它们现在重叠了。
s2Transformed = transformScan (s2,姿势);情节(s1)在情节(s2Transformed)从
输入参数
输出参数
扩展功能
介绍了R2017a
你也可以从以下列表中选择一个网站: