matchScans
估计两次激光扫描之间的位姿
句法
描述
例子
激光雷达扫描匹配
创建参考激光雷达扫描使用lidarScan。指定范围和角度为向量。
refRanges = 5 * 1 (1300);refAngles = linspace(-pi / 2,PI / 2300);refScan = lidarScan(refRanges,refAngles);
使用transformScan函数,生成在第二激光雷达扫描X,Y偏置的(0.5,0.2)。
currScan = transformScan(refScan,[0.5 0.2 0]);
匹配参考扫描和第二次扫描,以估计它们之间的位姿差异。
姿态= matchScans(currScan,refScan);
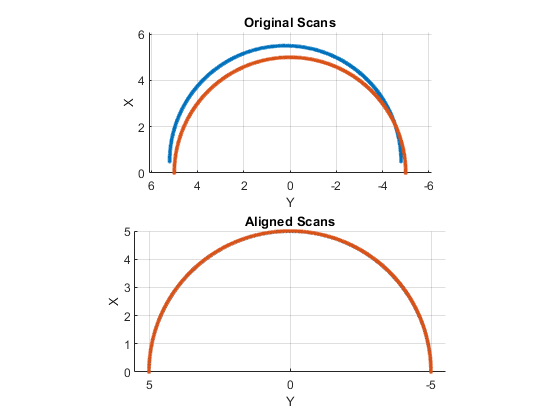
使用transformScan函数的作用是:通过使用相对位姿差将第二次扫描转换为第一次扫描的帧来对齐扫描。绘制原始扫描和对齐扫描。
currScan2 = transformScan(currScan,姿势);副区(2,1,1);保持在图(currScan)图(refScan)称号(“扫描原件”)举行从次要情节(2,1,2);保持在情节(currScan2)情节(refScan)标题(“对齐扫描”) xlim([0 5])保持从
比赛激光扫描
本例使用'fminunc'求解算法来执行扫描匹配。此求解算法需要优化工具箱™许可证。
指定一个基准激光扫描作为范围和角度。
refRanges = 5 * 1 (1300);refAngles = linspace(-pi / 2,PI / 2300);
使用transformScan函数,生成在第二激光扫描X,Y偏置的(0.5,0.2)。
[currRanges,currAngles] = transformScan(refRanges,refAngles,[0.5 0.2 0]);
匹配参考扫描和第二次扫描,以估计它们之间的位姿差异。
构成= matchScans (currRanges currAngles、refRanges refAngles,“SolverAlgorithm”,'fminunc');
提高通过给予初始姿势估计的估计。
构成= matchScans (currRanges currAngles、refRanges refAngles,...“SolverAlgorithm”,'fminunc','InitialPose'-0.4 - -0.1 [0]);
使用transformScan函数的作用是:通过使用相对位姿差将第二次扫描转换为第一次扫描的帧来对齐扫描。绘制原始扫描和对齐扫描。
[currRanges2, currAngles2] = transformScan (currRanges currAngles,姿势);[x1, y1] = pol2cart(折光,折光);[x2, y2] = pol2cart(currAngles,currRanges);[x3, y3] = pol2cart(currAngles2,currRanges2);次要情节(1、2、1)情节(x1, y1,“o”,X2,Y2,'* R')标题(“扫描原件”)副区(1,2,2)图(X1,Y1,“o”,X3,Y3,'* R')标题(“对齐扫描”)

输入参数
输出参数
参考文献
[1]拜伯,P.,和W.斯特拉瑟。“正态分布变换:一种新的方法,以激光扫描匹配。”智能机器人与系统论文集。2003.
[2]Magnusson,马丁。“三维正态分布变换——一种有效的配准、表面分析和环路检测的表示方法。”PhD Dissertation. Örebro University, School of Science and Technology, 2009.
扩展功能
也可以看看
功能
类
话题
介绍了在R2019b
你也可以从以下列表中选择一个网站: