主要内容
matchScansGrid
使用网格搜索估计两个激光雷达扫描之间的姿态
语法
描述
[___) = matchScansGrid (___、名称、值)使用一个或多个指定选项名称,值对参数。例如,“InitialPose”,[1 1π/ 2]指定扫描匹配的初始位姿估计。
例子
使用基于网格的搜索匹配扫描
执行扫描匹配使用网格搜索估计两个激光扫描之间的姿态。从扫描生成一个概率网格,并估计从这些网格的姿态差异。
加载激光扫描数据。这两个扫描来自一个实际的激光雷达传感器机器人姿态的变化被存储为lidarScan对象。
负载laserScans.mat扫描scan2情节(扫描)在情节(scan2)从
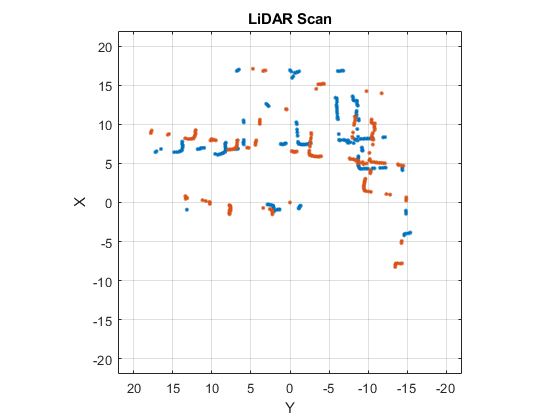
使用matchScansGrid来估计两次扫描之间的姿势。
relPose = matchScansGrid (scan2、扫描);
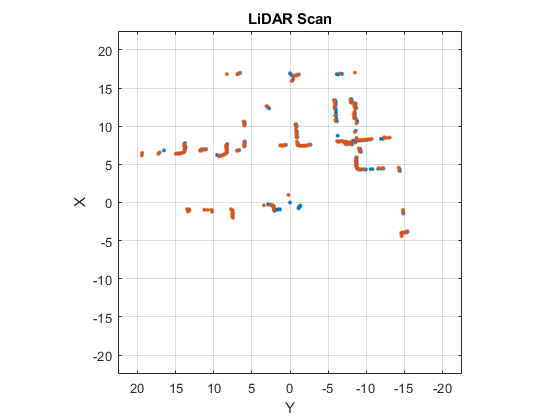
使用估计的位姿,将当前扫描转换回参考扫描。当你把它们画在一起时,它们的扫描重叠得很紧密。
scan2Tformed = transformScan (scan2 relPose);情节(扫描)在情节(scan2Tformed)从
输入参数
输出参数
参考文献
Hess, Wolfgang, Damon Kohler, Holger Rapp, and Daniel Andor。二维激光雷达SLAM中的实时环路闭合2016 IEEE机器人与自动化国际会议(ICRA).2016.
扩展功能
另请参阅
功能
类
介绍了R2019b
你也可以从以下列表中选择一个网站: