Lidarslam.
使用LIDAR扫描执行本地化和映射
描述
这Lidarslam.类对LIDAR扫描传感器输入执行同时定位和映射(SLAM)。SLAM算法采用LIDAR扫描,并将它们附加到底层姿态图中的节点。然后,算法将扫描匹配与扫描相关联。它还搜索循环封闭,其中扫描重叠先前映射区域,并优化姿势图中的节点姿势。
创建
句法
描述
懒j= Lidarslam.
懒j= Lidarslam(mapresolution.那maxlidarrange.)mapresolution.和maxlidarrange.基于输入的属性。
懒j= Lidarslam(mapresolution.那maxlidarrange.,maxnumscans)maxnumscans.是一个正整数。仅在生成代码时才需要此扫描限制。
特性
对象功能
addscan. |
将扫描添加到Lidar Slam Map |
复制 |
复制LIDAR SLAM对象 |
removeloopclosures. |
从姿势图删除环形封闭 |
ScanSandpose. |
提取扫描和对应的姿势 |
显示 |
情节扫描和机器人姿势 |
例子
使用LIDAR扫描执行SLAM
用一个Lidarslam.对象迭代地添加和比较LIDAR扫描并构建机器人轨迹的优化姿势图。要从相关的姿势和扫描中获取占用地图,请使用Buildmap.功能。
加载数据并设置SLAM算法
加载单元格数组Lidarscan.对象。LIDAR扫描由ClearPathRobotics®的哈士奇®机器人的停车车库收集。通常,LIDAR扫描以高频拍摄,并且每个扫描都不需要SLAM。因此,通过仅选择每40次扫描来扫描扫描。
加载Garage_fl1_southend.mat.扫描扫描=扫描(1:40:结束);
要设置SLAM算法,请指定LIDAR范围,地图分辨率,循环闭合阈值和搜索半径。调整特定机器人和环境的这些参数。创造Lidarslam.对象具有这些参数。
maxrange = 19.2;%仪表分辨率= 10;每米%细胞Slamobj = Lidarslam(分辨率,maxrange);slamobj.loopclosurethreshold = 360;slamobj.loopclosuresearchradius = 8;
迭代地添加扫描
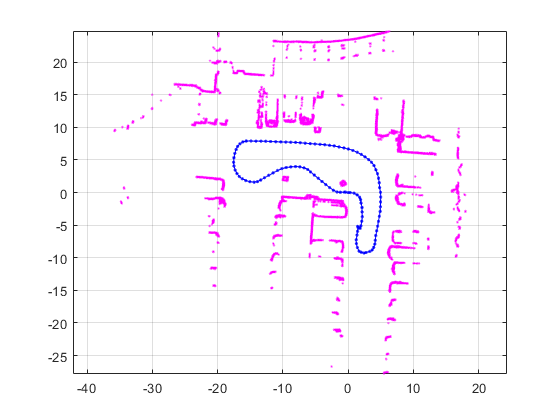
用一个为了循环,将扫描添加到SLAM对象。该对象使用扫描匹配来将每个添加的扫描比较到先前添加的扫描。为了改进地图,每当检测到环路时,对象会优化姿势图。每10个扫描,显示存储的姿势和扫描。
为了i = 1:numel(扫描)addscan(Slamobj,Scans {i});如果REM(i,10)== 0 show(slamobj);结尾结尾
查看占用地图
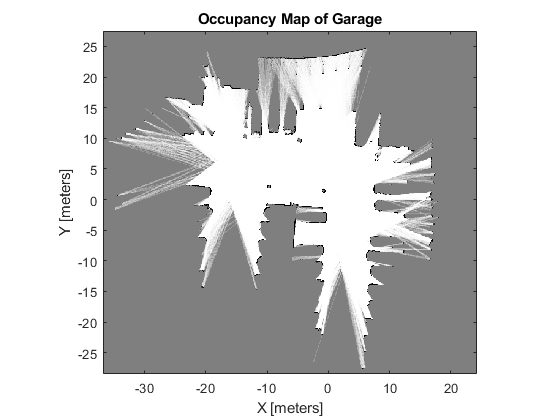
将所有扫描添加到Slam对象后,构建一个占领子通过呼叫地图Buildmap.随着扫描和姿势。使用与Slam对象一起使用的相同地图分辨率和最大范围。
[Scansslam,Pose] = ScanSandpose(Slamobj);orcomap = buildmap(Scansslam,Pose,分辨率,maxrange);图显示(orcomap)标题('车库的占用地图')
更多关于
参考
[1] Hess,Wolfgang,Damon Kohler,Holger Rapp和Daniel Andor。“2D LIDAR SLAM中的实时循环关闭。”2016年IEEE机器人与自动化国际会议(ICRA)。2016年。
扩展能力
您还可以从以下列表中选择一个网站: