显示
情节扫描和机器人姿态
描述
例子
使用激光雷达扫描执行大满贯
使用一个lidarSLAM迭代对象添加和比较激光雷达扫描和建立一个优化机器人的轨迹构成图。从相关的姿势和入住率地图扫描,使用buildMap函数。
加载数据,建立SLAM算法
负载单元阵列lidarScan对象。激光雷达扫描收集在一个停车场沙哑的从ClearPath机器人®®机器人。通常情况下,在高频率和激光雷达扫描每个扫描不需要大满贯。因此,每40才下样品扫描通过选择扫描。
负载garage_fl1_southend.mat扫描扫描=扫描(1:结束);
设置SLAM算法,指定激光雷达范围,地图的分辨率,关闭循环阈值,和搜索半径。为您的特定的机器人和环境调整这些参数。创建lidarSLAM与这些参数对象。
maxRange = 19.2;%米分辨率= 10;%细胞每米slamObj = lidarSLAM(分辨率,maxRange);slamObj。LoopClosureThreshold = 360;slamObj。LoopClosureSearchRadius = 8;
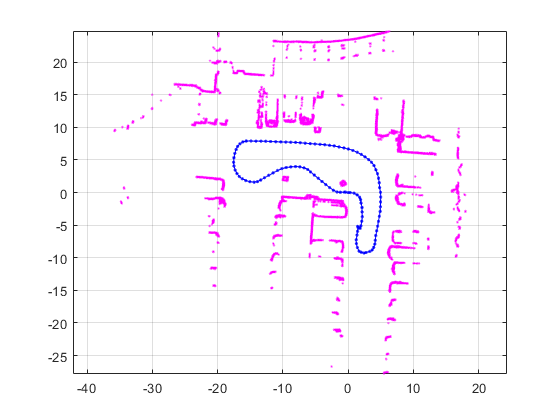
添加扫描迭代
使用一个为循环,增加扫描大满贯对象。添加的对象使用扫描匹配比较每个扫描之前添加的。提高地图,对象优化构成图当它检测到一个循环关闭。每10个扫描,显示存储的姿态和扫描。
为i = 1:元素个数(扫描)addScan (slamObj扫描{我});如果快速眼动(我,10)= = 0显示(slamObj);结束结束
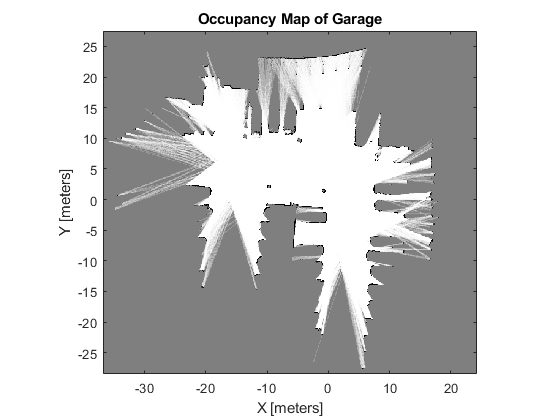
地图视图入住率
添加所有大满贯的扫描对象之后,建立一个occupancyMap通过调用地图buildMap扫描和姿势。使用相同的图分辨率和马克斯与大满贯对象范围使用。
[scansSLAM,姿势]= scansAndPoses (slamObj);occMap = buildMap (scansSLAM、姿势、分辨率、maxRange);图显示(occMap)标题(“车库的入住率地图”)
输入参数
输出参数
版本历史
介绍了R2019b