poseGraph
创建2-D姿态图
描述
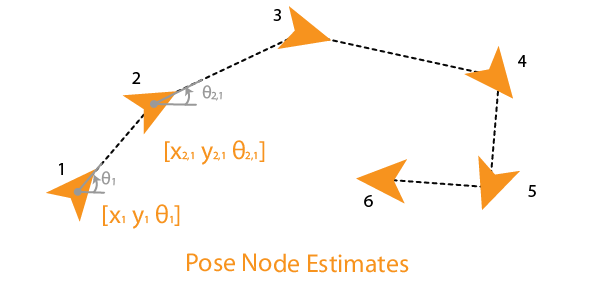
一种poseGraph对象存储2-D姿态图表示的信息。姿势图包含由边缘连接的节点。每个节点估计通过边缘约束连接到图表,该边沿限制定义节点之间的相对姿势和该测量的不确定性。
要迭代地构建姿势图,请使用addrelationpose添加相对姿势估计的功能并将它们连接到具有指定边缘约束的现有节点。必须相对于姿势节点指定姿势节点。使用信息矩阵指定测量的不确定性。
在两个非顺序节点之间添加一条边将创建一个循环关闭图中。多个边缘或多级节点对之间也支持,其中包括循环闭包。金宝app要添加额外的边缘约束或循环闭包,请使用addrelationpose函数。优化姿势图时,优化术照片.功能找到满足所有这些边缘约束的解决方案。
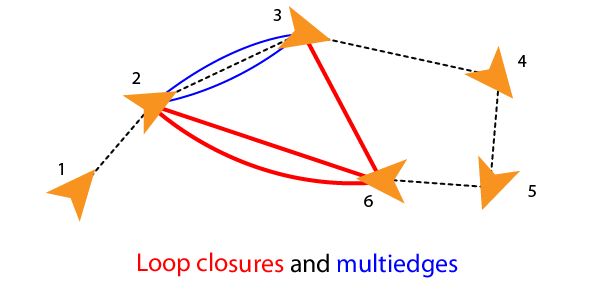
要添加地标点节点,请使用addpointlandmark.函数。该函数指定节点为XY.- 没有取向估计的点。必须相对于姿势节点指定地标。

这Lidarslam.目标进行基于激光雷达的同步定位和测绘,这是基于一个二维姿态图的优化。
有关3-D姿势图,请参见Posegraph3d.对象或者使用APRILTAG标记的地标SLAM的例子。
创建
描述
posegraph = posegraph..创建一个2-D姿态图对象。使用姿势使用addrelationpose迭代地构建姿势图。
Posegraph = PoseGraph('maxnumedges',maxedges,'maxnodes',maxnodes)指定生成代码时姿态图中允许的边数和节点数的上限。只有在生成代码时才需要此语法。
特性
对象功能
addpointlandmark. |
在姿态图中添加地标点节点 |
addrelationpose |
添加相对姿势以姿态图 |
复制 |
创建姿势图形的副本 |
Edgenodepaire. |
姿势图中的边缘节点对 |
edgeConstraints |
姿势图中的边缘约束 |
edgeresidualerrors. |
计算位姿图的边缘残差 |
findEdgeID |
找到边缘的边缘ID |
nodeStimates. |
姿势图的节点姿势 |
搬运 |
从图中删除环形闭合边缘 |
展示 |
情节姿势图 |
例子
优化二维姿态图
基于节点和边约束的位姿图优化。这个例子中使用的姿势图来自英特尔研究实验室数据集并由室内实验室收集车轮型测距和激光测距仪传感器信息产生。
加载包含2-D姿态图的英特尔数据集。检查poseGraph对象以查看节点和循环闭环的数量。
加载intel-2d-posegraph.matpgDISP(PG)
带有物业的姿势图:numnodes:1228 NumEdges:1483 Numloopfloseed:256 LoopCloseredIds:[1x256双] LandlarkNodeDS:[1x0双]
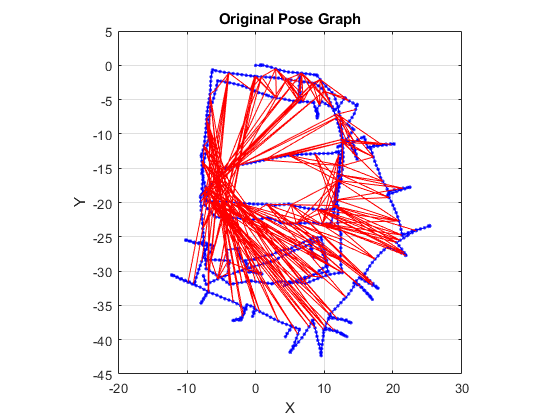
绘制带有IDS的姿势图。红线表示数据集中标识的循环闭合。
显示(pg,“id”那“关闭”);标题('原始姿势图')
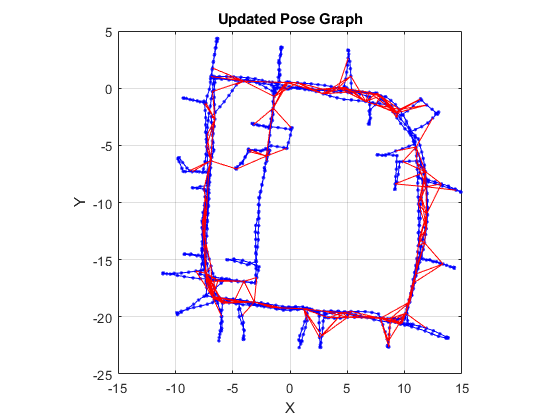
优化姿势图。基于边缘约束和循环闭合来调整节点。绘制优化的姿势图,以查看带环闭合的节点的调整。
updatedPG = optimizePoseGraph (pg);图显示(updatedPG,“id”那“关闭”);标题('更新的姿势图')
参考文献
[1] Grisetti, G., R. Kummerle, C. Stachniss, W. Burgard。“基于图形的SLAM教程”。IEEE智能交通系统杂志.卷。2,第4,2010号,第31-43页。DOI:10.1109 / mits.2010.939925。
扩展能力
也可以看看
职能
对象
你也可以从以下列表中选择一个网站: