poseGraph3D
创建3-D姿势图
描述
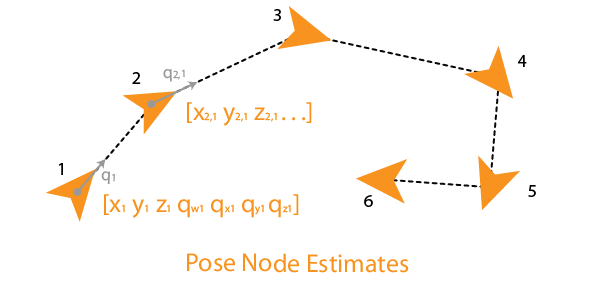
一个poseGraph3D对象存储3-D姿态图表示的信息。姿势图包含由边缘连接的节点。每个节点估计通过边缘约束连接到图表,该边沿限制定义节点之间的相对姿势和该测量的不确定性。
迭代构造一个姿势图,使用addRelativePose函数添加相对姿态估计并将它们连接到具有指定边约束的现有节点。姿态节点必须相对于姿态节点指定。使用信息矩阵指定测量的不确定度。
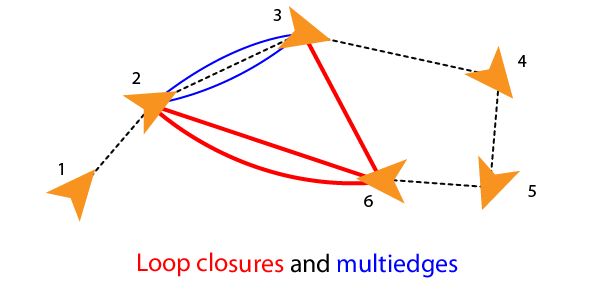
在两个非顺序节点之间添加边沿创建一个循环关闭在图表中。多个边缘或multiedges还支持节点对之间,其中包括环闭合。金宝app要添加其他边缘约束或循环闭环,请使用该指定节点IDaddRelativePose函数。在优化姿态图时,optimizePoseGraph函数找到满足所有这些边约束的解。
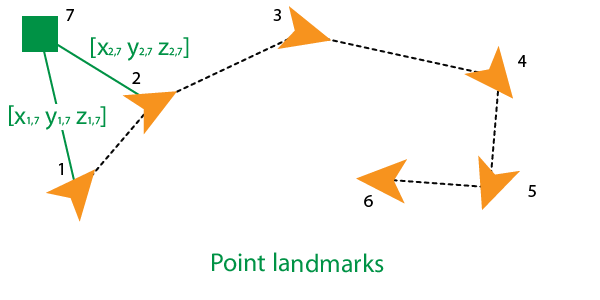
要添加地标点节点,请使用addPointLandmark函数。此函数指定节点作为XYZ.-没有方向估计的点。地标必须相对于位姿节点指定。
对于2-D姿态图,请参阅poseGraph.
有关从真实世界的传感器数据构建和优化3-D姿态图的示例,请参见使用AprilTag标记的Landmark SLAM.
创建
描述
poseGraph = poseGraph3D创建一个3-D姿势图形对象。添加的姿势使用addRelativePose迭代地构造一个姿态图。
PoseGraph = PoseGraph3d('maxnumedges',maxedges,'maxnodes',maxnodes)在生成代码时,指定姿态图中允许的边缘和节点数的上限。仅在生成代码时才需要此限制。
属性
对象的功能
addPointLandmark |
添加标志性点节点以姿态图 |
addRelativePose |
在姿势图中添加相对姿势 |
复制 |
创建姿势图副本 |
edgeNodePairs |
位姿图中的边节点对 |
Edgeconstraints. |
位姿图中的边约束 |
edgeResidualErrors |
计算姿势图边缘剩余错误 |
FistEddeid. |
找到边的边ID |
nodeEstimates |
位姿图中节点的位姿 |
removeEdges |
从图形中删除循环闭合边 |
显示 |
情节构成图 |
例子
优化3-D姿态图
基于节点和边约束的位姿图优化。本例中使用的姿势图取自MIT DataSet.是利用从停车场提取的信息生成的。
从MIT数据集加载姿态图。检查poseGraph3D对象,以查看节点和循环闭包的数量。
负载parking-garage-posegraph.matPG.disp (pg);
poseGraph3D与属性:NumNodes: 1661 nummedges: 6275 NumLoopClosureEdges: 4615 LoopClosureEdgeIDs: [1x4615 double] LandmarkNodeIDs: [1x0 double]
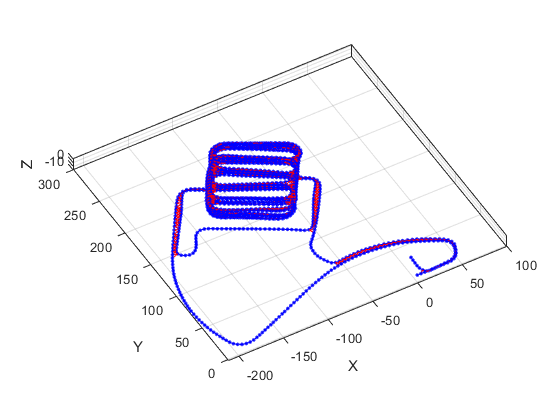
在没有id的情况下绘制姿态图。红线表示在数据集中标识的循环闭包。
标题(“原来的姿势图”)显示(pg,“id”,'离开');查看(-30,45)
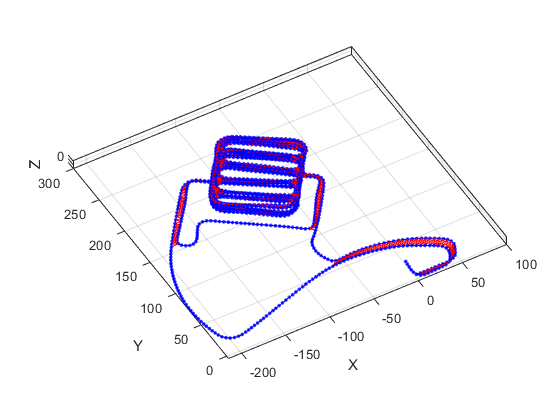
优化姿势图。节点根据边缘约束和循环闭包进行调整。绘制优化的姿态图,以查看节点与循环闭包的调整。
updatedPG = optimizePoseGraph (pg);图的标题(“更新姿势图”)显示(updatedPG“id”,'离开');查看(-30,45)
参考
Carlone, Luca, Roberto Tron, Kostas Daniilidis和Frank Dellaert。三维SLAM的初始化技术:旋转估计及其在位姿图优化中的应用综述2015 IEEE机器人与自动化国际会议(ICRA).2015年,页4597 - 4604。
扩展功能
另请参阅
功能
对象
您还可以从以下列表中选择一个网站: