主要内容
从激光雷达扫描和姿态建立占用地图
这个构建地图该功能接收激光雷达扫描读数和相关姿态,以建立一个占用网格利达斯卡纳对象和关联[x yθ]摆姿势以建立职业地图.
从停车场机器人上的传感器收集的负载扫描和姿态估计。收集到的数据使用利达斯拉姆该算法执行扫描匹配,在整个机器人轨迹上关联扫描并调整姿态。检查以确保扫描和姿势长度相同。
负载扫描姿势.mat长度(扫描)=长度(姿势)
答案=符合逻辑的1.
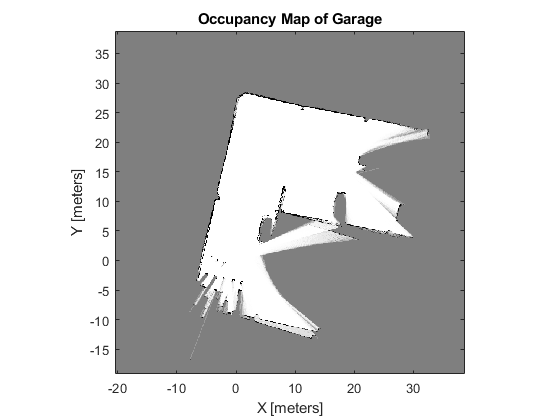
绘制地图。在中指定扫描和姿势构建地图功能,包括所需的地图分辨率(每米10个单元格)和激光雷达的最大范围(19.2米)。每次扫描都会在相关姿势处添加,并更新占用网格中的概率值。
occMap=buildMap(扫描,姿势,10,19.2);图显示(occMap)标题('车库占用地图')
也可以从以下列表中选择网站: