phased.MultipathChannel
传播信号多路通道
描述
的phased.MultipathChannel系统对象™传播信号通过多路径通道。运行的对象,您必须为每个路径提供特征:时间延迟,增益,多普勒因子,反射损失,和传播损失。
对于声纳应用程序,您可以使用phased.IsoSpeedUnderwaterPaths系统对象生成通道路径特征。你也可以独立供应这些特征。
通过多路径通道信号传播模型:
请注意
而不是使用一步定义的方法来执行操作系统对象,您可以调用对象的参数,就好像它是一个函数。例如,y =步骤(obj, x)和y = obj (x)执行相同操作。
建设
宣传者= phased.MultipathChannel
宣传者= phased.MultipathChannel (的名字,价值)的名字设置为指定的价值。您可以指定额外的名称和值对参数在任何顺序(Name1, Value1、……的,家)。
属性
例子
单向信号在多径水声信道传播
创建一个five-path水声信道矩阵和计算传播路径,多普勒因子,吸收损失。假设源是沿着固定和接收者x设在源在20公里/小时。假设默认的单向传播。
创建通道和指定源和接收器的位置和速度。
numpaths = 5;频道= phased.IsoSpeedUnderwaterPaths (“ChannelDepth”,200,“BottomLoss”10…“NumPathsSource”,“属性”,“NumPaths”,numpaths);tstep = 1;srcpos = (0, 0, -160);rcvpos = (100; 0; -50);速度= -20 * 1000/3600;srcvel = (0, 0, 0);rcvvel =(速度,0,0);
计算路径矩阵、多普勒因子和损失。
[pathmat,夹住,absloss] =通道(srcpos、rcvpos srcvel, rcvvel, tstep);
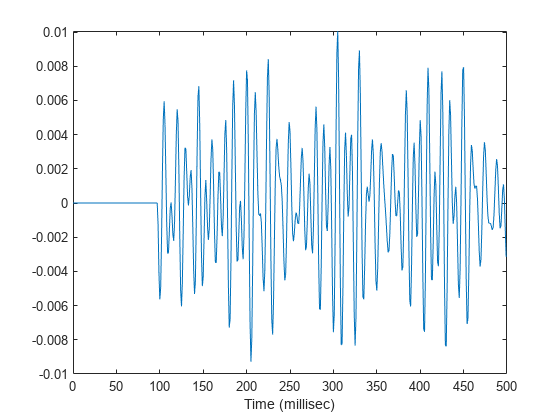
创建500个样本的100赫兹的信号。假设所有的路径都有相同的信号。传播信号到接收机。
fs = 1 e3;nsamp = 500;宣传者= phased.MultipathChannel (“OperatingFrequency”,10 e3,“SampleRate”fs);t = [0:(nsamp-1)] / fs;sig0 =罪(2 *π* 100 * t);sig = repmat (sig0 1 numpaths);propsig =传播算子(团体、pathmat计划下,absloss);
情节的连贯和传播的实部信号。
情节(t * 1000,实际(sum (propsig, 2)))包含(的时间(毫秒))
双向多径水声信道中信号传播
创建一个seven-path水声信道和显示矩阵的传播路径。假设源是静止的,接收者是沿着x设在源在20公里/小时。假设双向传播。
速度= -20 * 1000/3600;numpaths = 7;csound = 1515.0;频道= phased.IsoSpeedUnderwaterPaths (“ChannelDepth”,200,…“PropagationSpeed”csound,“BottomLoss”10“NumPathsSource”,“属性”,…“NumPaths”numpaths,“TwoWayPropagation”,真正的);tstep = 1;srcpos = (0, 0, -160);tgtpos = (500; 0; -50);srcvel = (0, 0, 0);tgtvel =(速度,0,0);
获取路径矩阵,多普勒因子,损失,和目标反射和传输角度。
[pathmat,夹住,树脂黄、tgtangs srcangs] =通道(srcpos、tgtpos srcvel, tgtvel, tstep);
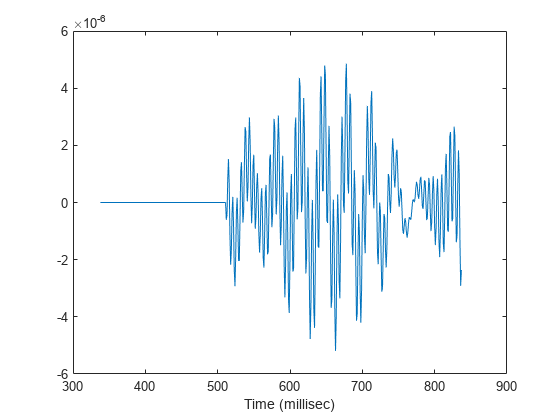
创建一个与500个样本100赫兹的信号。假设所有的路径都有相同的信号,但不同的振幅。然后,信号传播到目标。您可以使用角信息来计算任意角的依赖的源和目标响应。每个通道都可以有不同的振幅。这个例子使用一个简单的余弦模型。
fs = 1 e3;nsamp = 500;宣传者= phased.MultipathChannel (“OperatingFrequency”,10 e3,“SampleRate”fs);t = [0:(nsamp-1)] / fs;:ampsrc = cosd (srcangs (2));:amptgt = cosd (tgtangs (2));sig0 =罪(2 *π* 100 * t);sig = repmat (sig0 1 numpaths);amptotal = ampsrc。^ 2。* amptgt;sig = bsxfun (@times amptotal,团体);
由于有限的传播延迟,第一次调用信号的传播算子不返回。调用宣传者两次获得返回的信号。
propsig =传播算子(团体、pathmat计划下,树脂黄);propsig =传播算子(团体、pathmat计划下,树脂黄);
情节的连贯和传播的实部信号。计算往返时间。
rng = rangeangle (srcpos tgtpos);tr = rng / csound;情节((t + tr) * 1000,实际(sum (propsig, 2)))包含(的时间(毫秒))
声音传播渠道有未知数量的路径
创建一个水下声道和合并后的接收信号。自动发现路径的数量。假设源是静止的,接收者是沿着x设在源在20公里/小时。假设默认的单向传播。
速度= -20 * 1000/3600;频道= phased.IsoSpeedUnderwaterPaths (“ChannelDepth”,200,“BottomLoss”5,…“NumPathsSource”,“汽车”,“CoherenceTime”5);tstep = 1;srcpos = (0, 0, -160);rcvpos = (500; 0; -50);srcvel = (0, 0, 0);rcvvel =(速度,0,0);
计算路径矩阵、多普勒因子和损失。51宣传者输出输出但是一些路径可以包含路径南值。
[pathmat,夹住,absloss、rcvangs srcangs] =通道(srcpos、rcvpos srcvel, rcvvel, tstep);
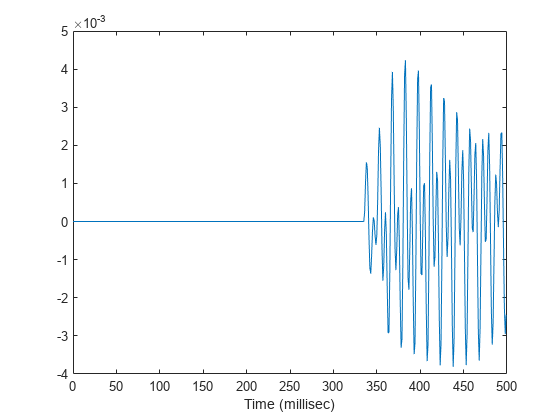
创建500个样本的100赫兹的信号。假设所有的路径都有相同的信号。使用一个phased.MultipathChannel系统对象™传播信号到接收机。phased.MultipathChannel接受产生的所有路径作为输入phased.IsoSpeedUnderwaterPaths但忽略了路径南值。
fs = 1 e3;nsamp = 500;宣传者= phased.MultipathChannel (“OperatingFrequency”,10 e3,“SampleRate”fs);t = [0:(nsamp-1)] / fs;sig0 =罪(2 *π* 100 * t);numpaths =大小(pathmat, 2);sig = repmat (sig0 1 numpaths);propsig =传播算子(团体、pathmat计划下,absloss);
情节的连贯和传播的实部信号。
情节(t * 1000,实际(sum (propsig, 2)))包含(的时间(毫秒))
多普勒声纳信号的拉伸
比较一个传播信号的持续时间从一个静止的声纳的声纳。移动声纳的径向速度25 m / s远离目标。在每种情况下,传播信号沿着单一路径。假设单向传播。
定义了声纳系统参数:最大的明确范围,所需的距离分辨率,操作频率和传播速度。
maxrange = 5000.0;rngres = 10.0;fc = 20.0 e3;csound = 1520.0;
用一个矩形波形信号传播。
脉冲重复频率= csound / (2 * maxrange);脉冲宽度= 8 * rngres / csound;pulseBW = 1 /脉冲宽度;fs = 80 * pulseBW;波形= phased.RectangularWaveform (“脉冲宽度”脉冲宽度,脉冲重复频率的脉冲重复频率,…“SampleRate”fs);
指定声纳的位置。
sonarplatform1 = phased.Platform (“InitialPosition”(0,0,-60),“速度”,(0,0,0));sonarplatform2 = phased.Platform (“InitialPosition”(0,0,-60),“速度”,(0;-25;0]);
指定目标位置。
targetplatform = phased.Platform (“InitialPosition”(0,500,-60),“速度”,(0,0,0));
定义水下路径和传播通道对象。
路径= phased.IsoSpeedUnderwaterPaths (“ChannelDepth”,100,…“CoherenceTime”0,“NumPathsSource”,“属性”,“NumPaths”,1…“PropagationSpeed”,csound);宣传者= phased.MultipathChannel (“SampleRate”fs,“OperatingFrequency”、fc);
创建传播波形。
wav =波形();nsamp =大小(wav, 1);rxpulses = 0 (nsamp, 2);t = (0: nsamp-1) / fs;
传输信号,然后接收固定声纳回声。
[pathmat,夹住,树脂黄,~,~]=路径(sonarplatform1.InitialPosition,…targetplatform.InitialPosition sonarplatform1.InitialVelocity,…targetplatform.InitialVelocity, 1 /脉冲重复频率);rxpulses(: 1) =传播算子(wav, pathmat,计划下,树脂黄);
发送和接收的声纳。
[pathmat,夹住,树脂黄,~,~]=路径(sonarplatform2.InitialPosition,…targetplatform.InitialPosition sonarplatform2.Velocity,…targetplatform.Velocity, 1 /脉冲重复频率);rxpulses(:, 2) =传播算子(wav, pathmat,计划下,树脂黄);
接收到的脉冲。
情节(abs (rxpulses)) xlim (650 [490]) ylim ([0 1.65 e - 3])传说(“静止的声呐”,“移动声纳”)包含(收到样品的时间(sec)的)ylabel (集成接收脉冲的)
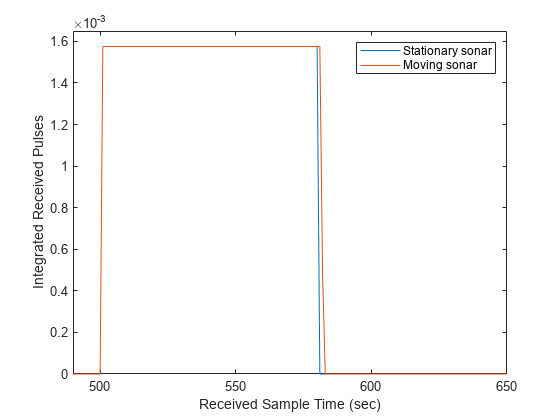
移动的信号接收声纳相比增加了时间静止的声纳。
引用
[1]Urick, r原则的水声,第3版。纽约:半岛出版,1996年。
[2]谢尔曼,cs和j·巴特勒对水声换能器和数组。纽约:施普林格,2007年。
[3]艾伦,j·b·d·伯克,“图像有效地模拟小房间声学方法”,j . Acoust。Soc。,第65卷,4号。1979年4月。
扩展功能
版本历史
介绍了R2017a