分阶段。ScenarioViewer
雷达和目标运动显示
描述
的分阶段。ScenarioViewerSystem Object™创建一个三维查看器,以显示雷达仿真中模型的雷达和目标的运动。您可以显示当前位置和速度,对象曲目,位置和速度注释,雷达光束方向和其他对象参数。您可以在仿真过程中更改雷达特征,例如光束范围和光束宽度。你可以使用淘汰系统对象来建模移动的对象,或者你可以提供自己的动态模型。
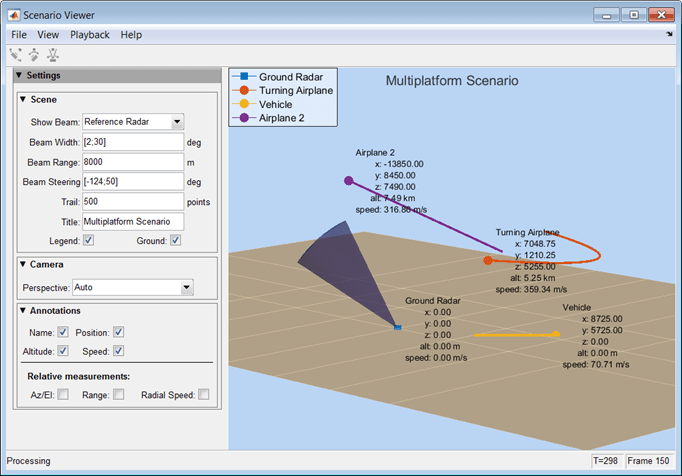
该图显示了由地雷达,两个飞机和地面车辆组成的四对象场景。您可以查看生成此数字的代码可视化多平台方案例子。
要创建方案查看器:
请注意
从R2016b开始,不再使用一步方法执行System对象定义的操作时,可以使用参数调用对象,就像调用函数一样。例如,y =步骤(obj, x)和y = obj (x)执行相同操作。
建设
姐姐=分阶段。ScenarioViewer姐姐具有默认属性值。
姐姐= phased.ScenarioViewer(名称,值)姐姐,带有指定的属性的名字设置为指定的价值.的名字必须出现在单引号内('').可以以任意顺序指定多个名称-值对参数name1,value1,...,namen,valuen.
属性
例子
查看静止雷达和一个目标的视图曲目
可视化雷达和单个飞机目标的轨迹。雷达静止不动,飞机沿直线飞行。保持雷达波束指向飞机。
创建雷达和飞机平台系统对象™。设置更新速率为0.1 s。
updateRate = 0.1;radarPlatform =分阶段。平台(...“InitialPosition”,[0; 0; 10],...“速度”, (0, 0, 0));airplanePlatforms =分阶段。平台(...“InitialPosition”(5000.0; 3500.0; 6000.0),...“速度”, -300, 0, 0);
创造分阶段。ScenarioViewer系统对象。显示雷达波束并标注轨道的位置、速度和高度。
然而=分阶段。ScenarioViewer (“BeamRange”, 5000.0,“UpdateRate”,updaterate,...“PlatformNames”, {“地面雷达”,“飞机”},'展示',真的,...“ShowSpeed”,真的,'露天',真的,“ShowLegend”,真正的);
运行场景。每一步,计算与目标的角度。用这个角度引导雷达波束向目标方向移动。
为i = 1:100 [radar_pos,radar_vel] = step(radarPlatform,updateRate); / /更新平台[tgt_pos, tgt_vel] = (airplanePlatforms updateRate)步;(rng, ang) = rangeangle (tgt_pos radar_pos);科学价值。BeamSteering = ang;步骤(然而,radar_pos radar_vel、tgt_pos tgt_vel);暂停(0.1);结束

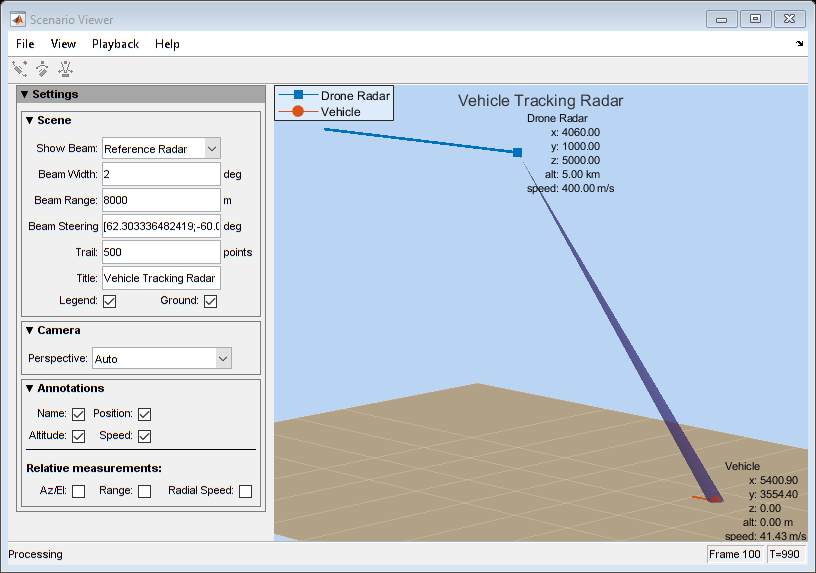
视图机载雷达和地面目标的轨道
可视化机载雷达和地面车辆目标的轨迹。机载雷达由一架在5公里高空飞行的无人驾驶飞机携带。
创建无人机雷达和地面车辆使用淘汰系统对象™。设置更新速率为0.1 s。
updateRate = 0.1;无人机=分阶段。平台(...“InitialPosition”(100; 1000; 5000),...“速度”, 400, 0, 0);车辆=分阶段。平台(“MotionModel”,“加速”,...“InitialPosition”(5000.0; 3500.0; 0.0),...“InitialVelocity”(40; 5 0),“加速”, (0.1, 0.1, 0));
创造分阶段。ScenarioViewer系统对象。显示雷达波束并标注轨道的位置、速度和高度。
观众=分阶段。ScenarioViewer (“BeamRange”, 8000.0,波束宽度的2,“UpdateRate”,updaterate,...“PlatformNames”, {'无人机雷达',“汽车”},'展示',真的,...“ShowSpeed”,真的,'露天',真的,“ShowLegend”,真的,'标题','车辆跟踪雷达');
运行场景。每一步,计算与目标的角度。用这个角度引导雷达波束向目标方向移动。
为i = 1:100 [radar_pos,radar_vel] = step(drone,updateRate); / /更新[tgt_pos, tgt_vel] =(车辆、updateRate)步;(rng, ang) = rangeangle (tgt_pos radar_pos);查看器。BeamSteering = ang;查看器(radar_pos radar_vel、tgt_pos tgt_vel)暂停(1。)结束
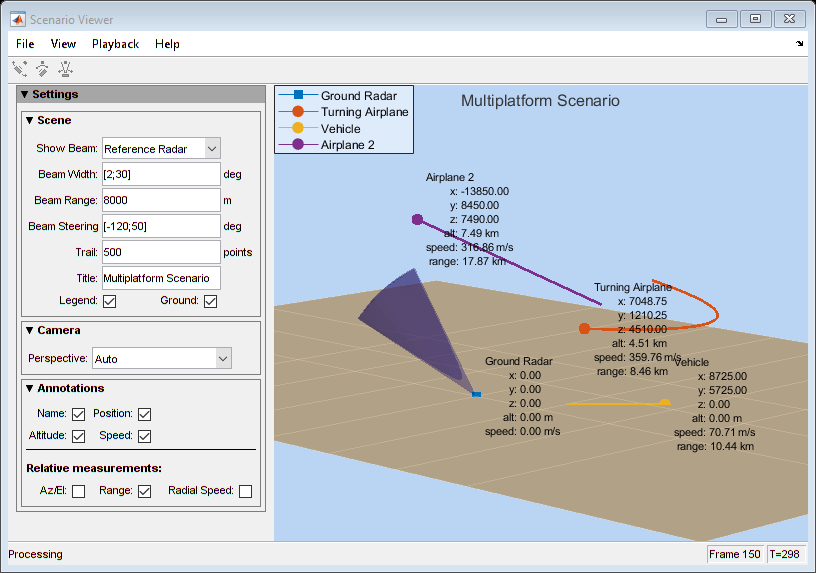
可视化多平台方案
这个示例展示了如何创建和显示一个多平台场景,该场景包含一个地面固定雷达、一个转弯飞机、一个恒定速度的飞机和一个移动的地面车辆。转弯飞机沿抛物线飞行,下降速度为20米/秒。
指定0.5 Hz的方案刷新率。对于150步,方案的持续时间为300秒。
updateRate = 0.5;N = 150;
设置转弯飞机使用加速度模型淘汰系统对象™。指定飞机从地面雷达的距离和方位角及其仰角的初始位置。飞机在60°方位角距离雷达10公里,高度6公里。飞机正以10m /s²的负速度加速x方向。
airplane1range = 10.0 e3;airplane1Azimuth = 60.0;airplane1alt = 6.0 e3;airplane1Pos0 = [cosd (airplane1Azimuth) * airplane1range;...sind(airplane1azimuth)* airplane1range; airplane1art];airplane1vel0 = [400.0; -100.0; -20];airplane1accel = [-10.0; 0.0; 0.0];airplane1platform = phased.platform(“MotionModel”,“加速”,...“AccelerationSource”,输入端口的,“InitialPosition”airplane1Pos0,...“InitialVelocity”airplane1Vel0,“OrientationAxesOutputPort”,真的,...“InitialOrientationAxes”、眼睛(3));
在全球坐标系原点处建立静止地面雷达。为了模拟旋转雷达,在处理回路中改变地面雷达波束转向角度。
groundRadarPos = (0, 0, 0) ';groundRadarVel = (0, 0, 0) ';groundradarplatform =分阶段。平台(“MotionModel”,“速度”,...“InitialPosition”groundRadarPos,“速度”,陆地扶手,...“InitialOrientationAxes”、眼睛(3));
使地面车辆以恒定速度移动。
groundVehiclePos = (5 e3, 2 e3, 0) ';groundVehicleVel = (50 50 0) ';groundvehicleplatform =分阶段。平台(“MotionModel”,“速度”,...“InitialPosition”groundVehiclePos,“速度”groundVehicleVel,...“InitialOrientationAxes”、眼睛(3));
让第二架飞机也以恒定速度移动。
airplane2Pos = (8.5 e3, 1 e3, 6000) ';airplane2Vel = (-300100, 20) ';airplane2platform =分阶段。平台(“MotionModel”,“速度”,...“InitialPosition”airplane2Pos,“速度”airplane2Vel,...“InitialOrientationAxes”、眼睛(3));
设置场景查看器。指定雷达的波束范围为8公里,垂直波束宽度为30°,水平波束宽度为2°。用位置、速度、高度和距离标注轨道。
BeamSteering = (0; 50);观众=分阶段。ScenarioViewer (“BeamRange”,8.0e3,波束宽度的,[2; 30],“UpdateRate”,updaterate,...“PlatformNames”, {“地面雷达”,“把飞机”,“汽车”,《飞机2》},'展示',真的,...“ShowSpeed”,真的,'露天',真的,“ShowLegend”,真的,“ShowRange”,真的,...'标题',“多平台的场景”,“BeamSteering”, BeamSteering);
步骤通过显示处理循环,更新雷达和目标位置。在每个步骤中将地基雷达转向角旋转四度。
为n = 1: n [grounddradarpos, grounddradarvel] = grounddradarplatform (updateRate);[airplane1Pos, airplane1Vel airplane1Axes] = airplane1platform (updateRate airplane1Accel);[vehiclePos, vehicleVel] = groundvehicleplatform (updateRate);[airplane2Pos, airplane2Vel] = airplane2platform (updateRate);查看器(groundRadarPos groundRadarVel [airplane1Pos vehiclePos, airplane2Pos),...[Airplane1Vel,Lasevel,Airplane2Vel]);Beamsteering = Viewer.beamstering(1);Beamsteering = Mod(Beamsteering + 4,360.0);如果Beamsteering> 180.0 Beamsteering = Beamsteering - 360.0;结束viewer.BeamSteering (1) = BeamSteering;暂停(0.2);结束
你也可以从以下列表中选择一个网站:
