文档帮助中心文档
等温液体网络不会因网络内部或周围发生的任何过程而发生温度或粘度变化,但可以支持升高或降低的温度。金宝app
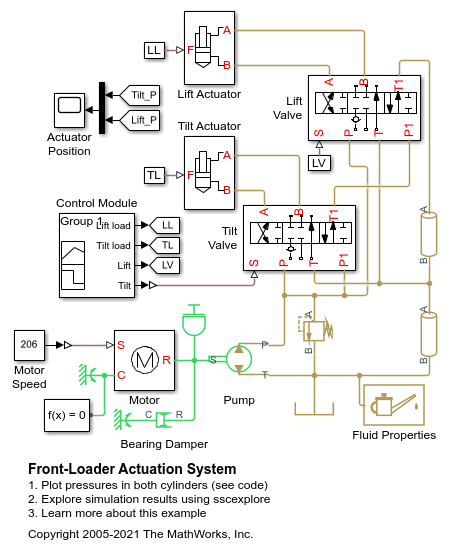
一个简化版本的驱动系统组成的提升和倾斜气缸。每个气缸由一个开式中心,6路,3位换向阀控制。这些阀门通过它们的卸载分支串联连接,这样当两个控制杆处于空档位置时,系统泵就可以卸载。如果使用倾斜或提升命令,则关闭卸载路径。
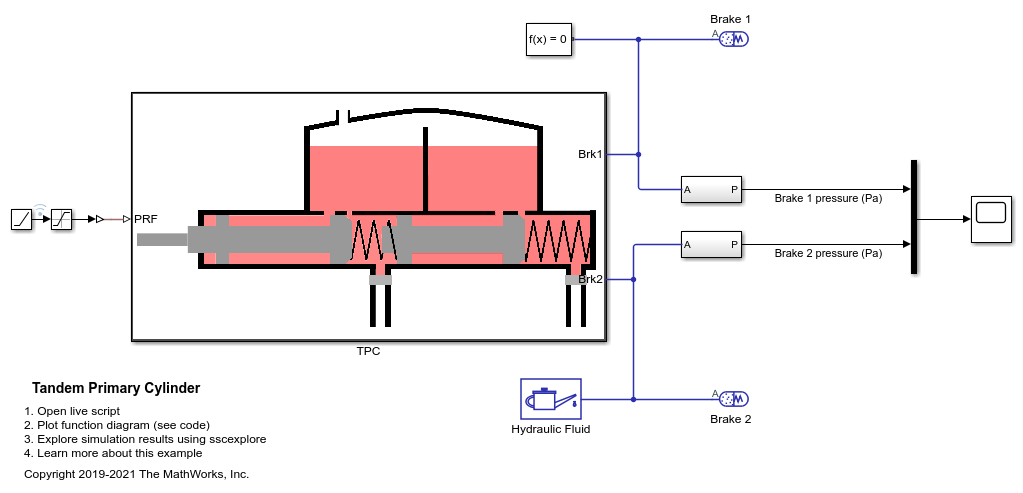
从制造商数据表开始,对串联主缸进行建模、参数化和测试。首先,对系统的数学建模进行了简要的讨论。给定从数据表中提取的数值数据,然后使用优化来确定剩余的未知参数。然后对模型进行仿真,得到的推杆力-制动压力关系曲线与制造商数据表提供的曲线进行了比较。了解串联主缸的性能是选择其他制动系统部件的重要前提。
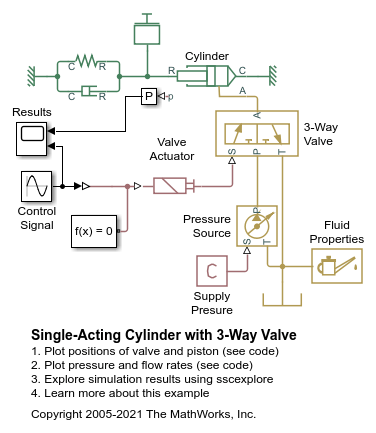
由三通换向阀控制的单作用液压缸。它驱动由质量、粘性摩擦和预紧弹簧组成的负载。泵装置被假定有足够的力量来维持阀门入口的恒定压力。
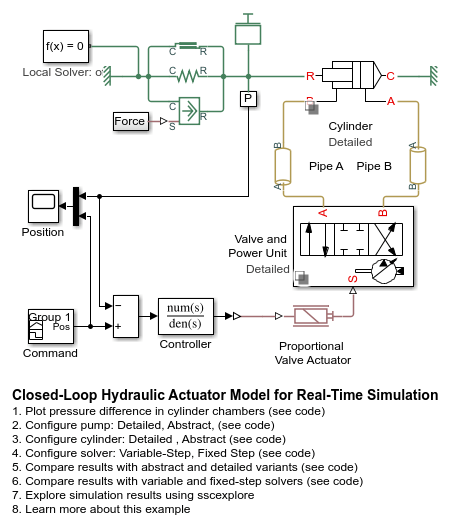
该驱动器由比例四通换向阀驱动双作用液压缸组成。气缸驱动由质量、粘性和库仑摩擦、恒力和弹簧组成的负载。执行机构是由一个恒定速度电机驱动的变量位移,压力补偿泵提供动力。用液压管路块模拟阀、缸、泵和油箱之间的管路。
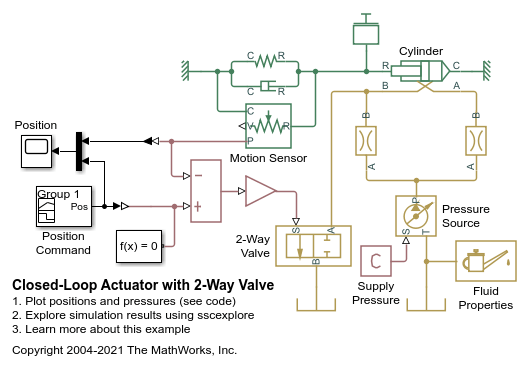
在一个闭环回路中使用一个双通阀和一个双作用液压缸、固定节流孔、质量、弹簧、阻尼器和控制块。
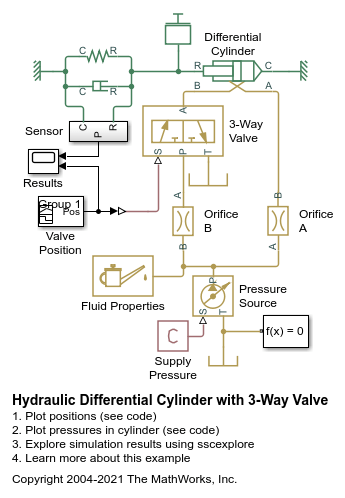
采用三通阀来控制液压差动缸的运动。该阀通过固定孔将钢瓶端口B连接到储罐或钢瓶腔A。由于活塞区域的不同,当其端口都连接到压力源时,气缸就会伸长。孔B控制扩展速度。如果腔B连接到储罐,则汽缸收缩。
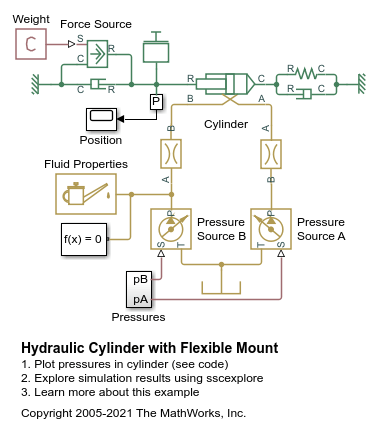
采用双作用液压缸。采用弹簧和阻尼器安装在缸体与基准之间的夹紧结构进行了仿真。气缸的前进和返回行程是由端口A和b的压力变化引起的。气缸负载由惯性、粘性摩擦和恒定的400牛的反向负载组成。
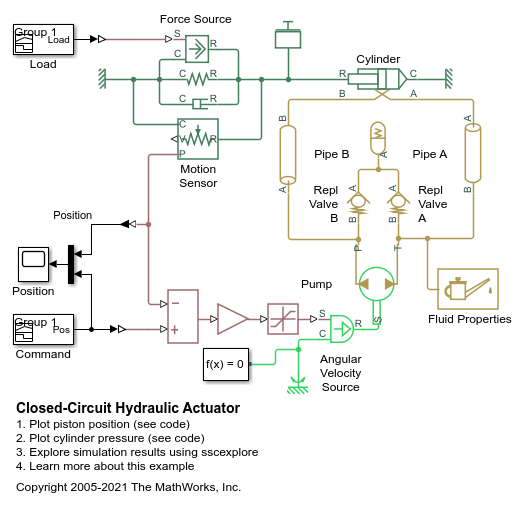
一种由变速马达驱动的闭路液压作动器。执行机构设置为一个封闭系统,有两个补充阀(止回阀)和一个弹簧蓄能器作为补充蓄能器。电机速度是由指令和实际执行器位置之间的差异来控制的。驱动器作用于弹簧、阻尼器和时变负载。
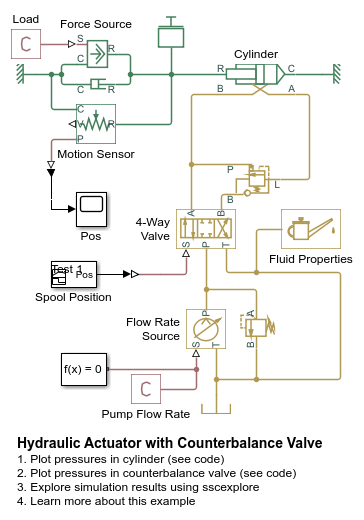
该模型由一个由开式中心四通换向阀控制的双作用液压缸和一个由流量源和减压阀组成的动力单元组成。气缸装载了10000n的主动力,试图伸展杆。换句话说,气缸在延伸时承受着过载。当换向阀处于空档位置时,为了保持杆位,防止失去对气缸伸长的控制,使用了平衡阀。阀门控制从a口返回的流量。阀门先导端口P连接到气缸端口B,因此在B口压力达到一定水平之前,气缸不可能移动。
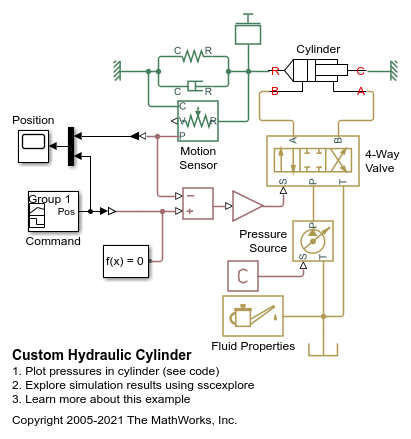
一种自定义液压缸模型,它忽略了缸腔内流体可压缩性的影响。双作用气缸连接到一个四通阀,模拟一个简单的闭环执行器。
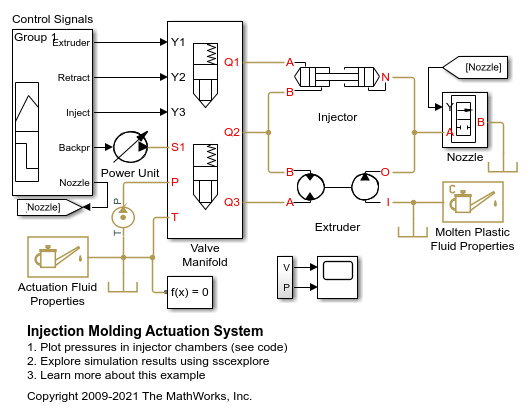
一种注塑驱动系统。该模型包含一组插装阀,用于控制泵、电机和气缸执行注塑过程的步骤。
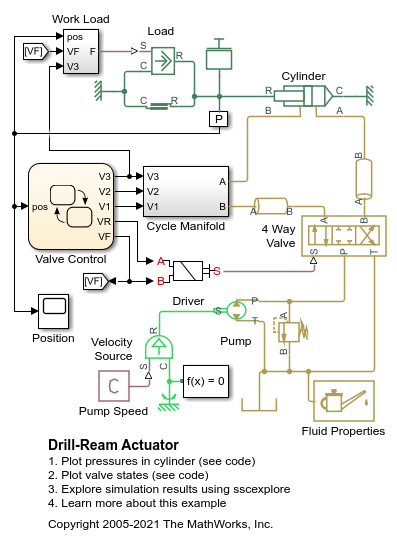
一种驱动机床工作单元执行一系列三种工艺操作的驱动器:粗钻、细钻和扩孔。执行机构的速度由三个压力补偿流量控制阀之一控制,计量从气缸的回流。选择合适的流量控制是通过控制单元激活的换向阀来实现的。
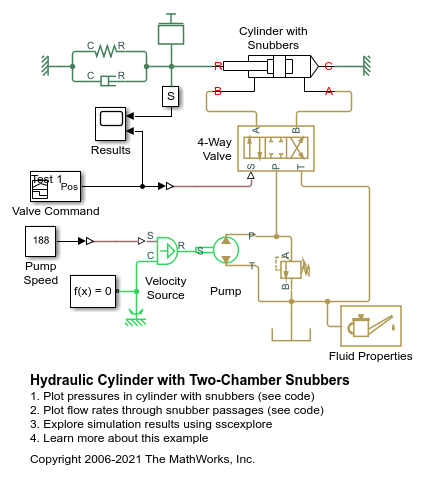
一种液压缸,在缸的两侧装有一个定制的缓冲装置(软垫)。当活塞接近冲程终点时,缓冲器是由缓冲衬套分开的两个腔室缓冲器。缓冲在气缸到达行程终点时提供液压制动,在活塞到达终点前吸收系统的一些动能。
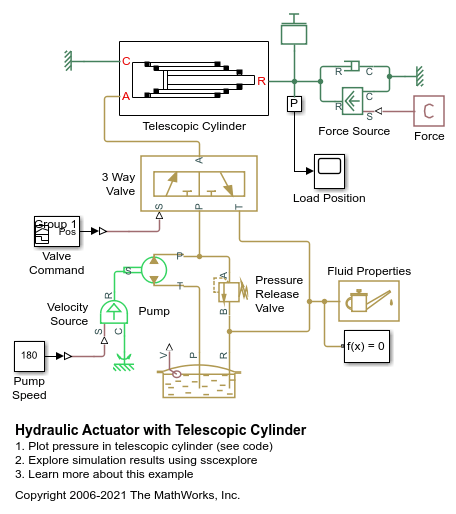
围绕伸缩液压缸建立的执行器,配备了三个杆通过硬停止相互作用。杆的有效面积分别设置为20、16和12 cm^2,这使得第一杆先移动,然后是第二杆,然后是第三杆。执行器由一个2位三通阀控制,该阀将执行器腔连接到油箱的空档位置。当控制信号施加到阀门上时,执行器腔与泵连接,执行器开始伸长。当燃烧室与燃料箱连接时,燃料棒被外部负载收回。动力单元安全阀设置为50bar,执行机构要处理的最大负载为2500n。
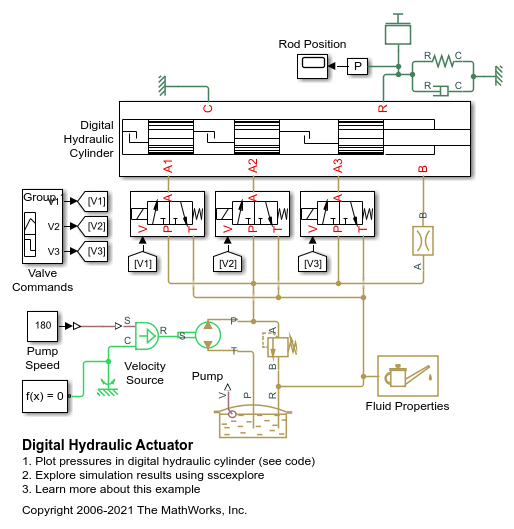
数字液压执行机构,由安装在同一壳体中的3个双作用气缸组成,并通过硬止动器相互连接。最左活塞与壳体之间的间隙为2^0*base_length,第一活塞与第二活塞之间的间隙设置为2^1*base_length,第二活塞与第三活塞之间的间隙设置为2^2*base_length。最右边腔室的活塞面积是其他腔室面积的一半。最右边的腔室永久连接到泵,而其他三个腔室连接到泵或油箱,这取决于2位三通电液阀。因此,在2^3*base_length范围内可以达到2^3个离散位置。
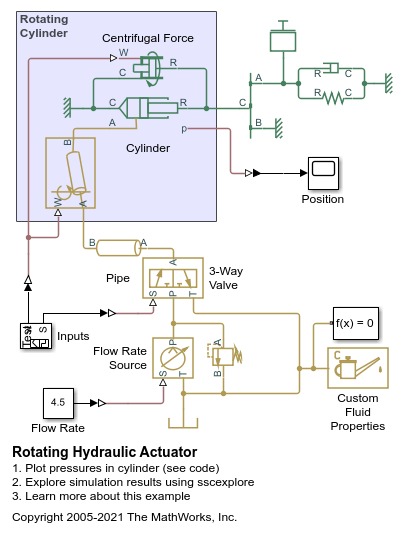
一种典型的液压缸执行机构,用于操作摩擦离合器、制动器和安装在转轴上的其他装置。执行器的关键部件是活塞,活塞在轴中的中央钻头和离合器的通道所提供的压力下来回移动。在这个例子中,驱动器作用于一个预加载弹簧,这往往推动活塞对离合器壁。
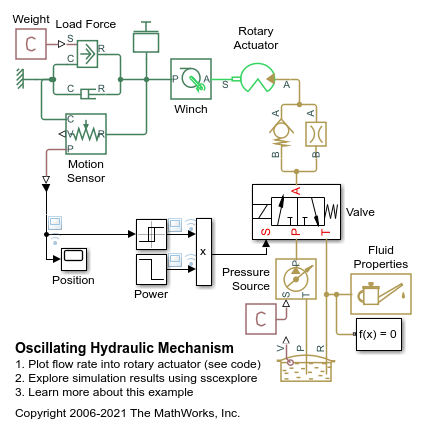
一种由单作用液压旋转执行器、绞车、流量控制阀、二位电液阀以及动力和控制单元组成的振荡液压机构。该机构通过将重物升高到25厘米,然后让重物下落,从而保持重物的垂直摆动。为了提高重量,电液阀通电并将动力单元连接到液压执行器入口。当重量达到25厘米时,阀门断电,将执行器腔连接到油箱。
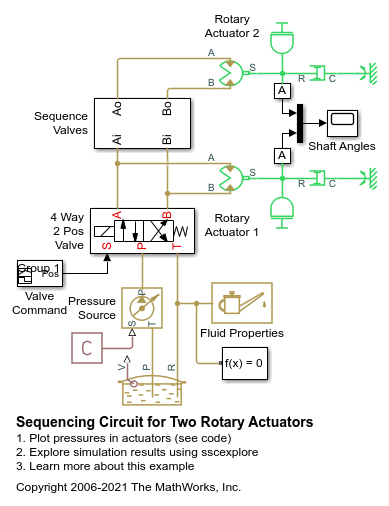
一个顺序电路,它基于安装在第二个旋转执行机构的压力和返回管道上的四个止回阀。所有阀门的开裂压力设置高于旋转执行器1的任何负载压力,但低于在冲程结束时,当旋转执行器1达到其硬停止时,在其腔室中发展的压力。因此,旋转执行器2开始移动只有在旋转执行器1完成它的行程。
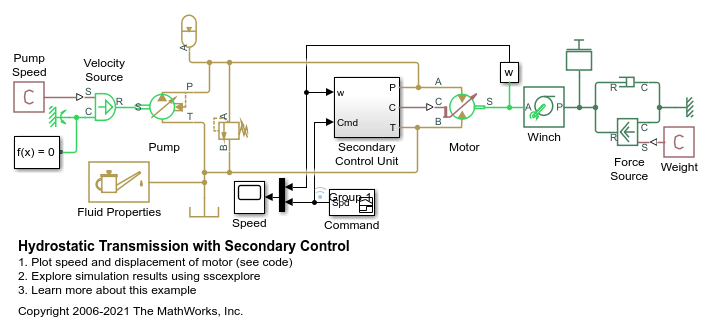
使用二次控制在液压传动与可变排量电机。它使用一个压力补偿变量泵,一个变量马达,并由一个二次控制单元控制。二次控制单元是一个由比例四通阀控制的伺服缸。伺服缸驱动变量马达的控制元件,变量马达由质量、弹簧和阻尼器表示。采用静压传动的角速度反馈闭环控制系统。它驱动绞车提升重物,并对粘性阻尼器起作用。为了提高系统的稳定性,在二次控制单元中引入了动态补偿器。
你点击一个链接对应于这个MATLAB命令:
通过在MATLAB命令窗口中输入命令来运行命令。Web浏览器不支持MATLAB命令。金宝app
选择一个网站,在那里获得翻译的内容,并看到当地的活动和优惠。根据您的位置,我们建议您选择:.
你也可以从以下列表中选择一个网站:
选择中国网站(中文或英文)以获得最佳网站性能。其他MathWorks国家站点没有针对您所在位置的访问进行优化。
与当地办事处联系
得到审判现在