主要内容
欧特克发明家
出口你的欧特克®发明家®以兼容的格式汇编模型Simscape™多体™软件
功能
smlink_linkinv |
添加Simscape多体链接作为欧特克的发明家插件 |
smlink_unlinkinv |
删除Simscape多体链接作为欧特克的发明家插件 |
主题
的Simscape多体链接插件提供了将CAD组件导出到Simscape多体模型。
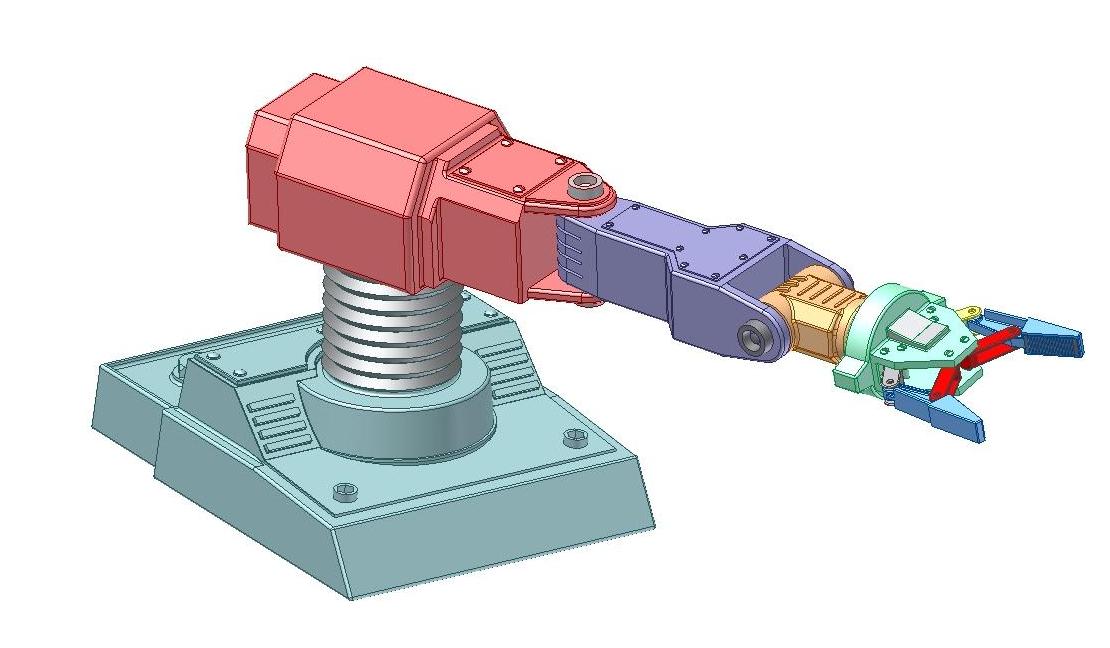
为机械臂组装生成一个XML多体描述文件。
该内容指的是Simscape多体链接第一代软件。
您可以通过在零件之间应用关节和约束来创建CAD装配。
特色的例子
你也可以从以下列表中选择一个网站: