创建自定义网格世界环境
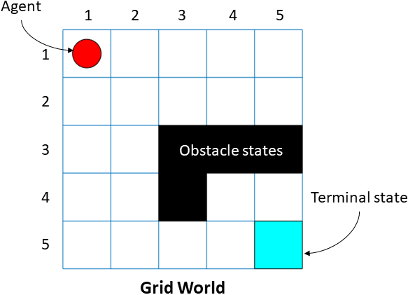
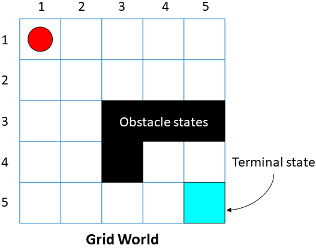
网格世界是一个二维的、基于细胞的环境,代理从一个细胞开始,并向终端细胞移动,同时收集尽可能多的奖励。网格世界环境有助于应用强化学习算法来发现网格上的代理以最少的移动达到终端目标的最优路径和策略。
强化学习工具箱™让您创建自定义MATLAB®您自己的应用程序的网格世界环境。创建一个自定义网格世界环境:
创建网格世界模型。
配置网格世界模型。
使用网格世界模型来创建您自己的网格世界环境。
网格世界模型
控件可以创建您自己的网格世界模型createGridWorld函数。控件时指定网格大小GridWorld模型对象。
的GridWorld对象具有以下属性。
| 财产 | 只读 | 描述 | ||||||
|---|---|---|---|---|---|---|---|---|
GridSize |
是的 | 网格世界的维度,显示为米——- - - - - -n数组中。在这里,米表示网格行数和n为网格列的数目。 |
||||||
现状后 |
没有 | 代理的当前状态的名称,以字符串形式指定。可以使用此属性设置代理的初始状态。代理总是从单元开始 代理从 |
||||||
州 |
是的 | 包含网格世界的状态名的字符串向量。例如,对于一个2乘2的网格世界模型 GW。州= [“(1)”;“(2,1)”;“[1,2]”;“(2,2)”]; |
||||||
行动 |
是的 | 包含代理可以使用的可能操作列表的字符串向量。控件可以在创建网格世界模型时设置操作 GW = createGridWorld (m, n,移动) 指定
|
||||||
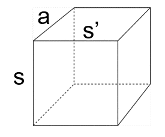
T |
没有 | 状态转移矩阵,指定为三维数组。
例如,考虑一个5乘5的确定性网格世界对象 northStateTransition = GW.T (:: 1)
由上图可知 |
||||||
R |
没有 | 奖励转换矩阵,指定为三维数组。 奖励转移矩阵
设置 |
||||||
ObstacleStates |
没有 |
黑色单元格是障碍状态,你可以使用以下语法指定它们: GW。ObstacleStates = [“[3 3]”;“[3,4]”;“[3,5]”;“[4 3]”]; 有关工作流示例,请参见在基本网格世界中训练强化学习代理. |
||||||
TerminalStates |
没有 |
GW。TerminalStates = "[5,5]"; 有关工作流示例,请参见在基本网格世界中训练强化学习代理. |

网格的世界环境
您可以使用以下方法创建Markov决策过程(MDP)环境rlMDPEnv从上一步的网格世界模型。MDP是一个离散时间随机控制过程。它提供了一个数学框架,用于在结果部分随机和部分在决策者控制下的情况下建模决策。代理使用网格世界环境对象rlMDPEnv与网格世界模型对象交互GridWorld.
有关更多信息,请参见rlMDPEnv和在基本网格世界中训练强化学习代理.
另请参阅
createGridWorld|rlMDPEnv|rlPredefinedEnv
相关的话题
你也可以从以下列表中选择一个网站:
