removeInvalidData
删除无效范围和角度数据
描述
例子
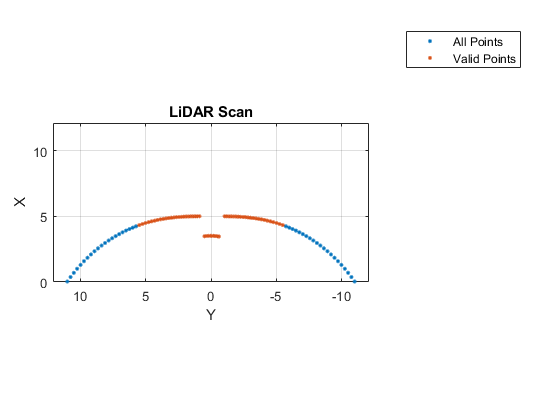
剧情激光雷达扫描并删除无效点
指定激光雷达数据的范围和角度的矢量。这些值包括读数以外的传感器的范围内。
X = linspace(-2,2);范围= ABS(。(1.5)* X ^ 2 + 5);范围(45:55)= 3.5;角度= linspace(-pi / 2,π/ 2,numel(范围));
通过指定范围和角度创建激光雷达扫描。画出激光雷达扫描的所有点。
扫描= lidarScan(范围,角度);图(扫描)

删除基于指定的最小和最大范围的无效点。
minRange = 0.1;maxRange = 7;SCAN2 = removeInvalidData(扫描,'RangeLimits'[minRange maxRange]);保持上图(SCAN2)传奇(“所有点”,“有效点”)
输入参数
输出参数
也可以看看
介绍了在R2017b
您还可以选择从下面的列表中的网站: