控制PR2手臂运动使用ROS行动和逆运动学
这个例子展示了如何在MATLAB®中向机械手发送命令。通过一个ROS网络,通过一个ROS action客户端发送联合位置命令。这个示例还展示了如何计算联合职位所需的末端执行器的位置。刚体树定义了机器人的几何形状和关节约束,并与逆运动学结合得到机器人的关节位置。然后你可以将这些关节位置作为轨迹发送给机器人来命令它移动。
打开PR2凉亭模拟
衍生PR2在一个简单的环境(只有一个表和可乐罐)在露台模拟器。执行先从Gazebo和一个模拟的TurtleBot开始(ROS工具箱)启动露台PR2模拟器从Ubuntu桌面®虚拟机。

连接到从MATLAB®ROS网络
在主机上的MATLAB实例中,运行以下命令在MATLAB中初始化ROS全局节点,并通过其IP地址连接到虚拟机中的ROS主机ipaddress。与你的虚拟机的IP地址替换“192.168.233.133”。如果需要指定端口。
ipaddress ='192.168.233.133';rosinit (ipaddress, 11311);
使用NodeURI http://192.168.233.1:57169/初始化全局节点/matlab_global_node_59258
对于机械手创建行动客户端和发送命令
在这个任务中,你发送关节轨迹到PR2武器。这些武器可以通过ROS操作来控制。关节轨迹为每个手臂手动指定,并通过单独的动作客户端作为单独的目标信息发送。
创建一个ROS simple action客户端来发送目标信息来移动机器人的右臂。rosactionclient(ROS工具箱)对象和目标信息返回。等待客户端连接到ROS动作服务器。
[rArm, rGoalMsg] = rosactionclient('r_arm_controller / joint_trajectory_action');waitForServer (rArm);
目标信息是trajectory_msgs / JointTrajectoryPoint消息。每个轨迹点应该指定关节的位置和速度。
DISP(rGoalMsg)
具有属性的ROS JointTrajectoryGoal消息:MessageType: 'pr2_controllers_msgs/JointTrajectoryGoal'弹道:[1×1 joint弹道]使用showdetails来显示消息的内容
disp (rGoalMsg.Trajectory)
ROS的联合弹道信息具有如下属性:MessageType:‘trajectory_msgs/ joint弹道’Header:[1×1 Header]联合名称:{0×1 cell} Points:[0×1 JointTrajectoryPoint]使用showdetails来显示消息内容
将联名以匹配PR2机器人关节名。请注意,有7个关节的控制。为了找到在PR2右臂关节什么,请在虚拟机终端以下命令:
rosparam / r_arm_controller /关节
rGoalMsg.Trajectory.JointNames = {“r_shoulder_pan_joint”,…“r_shoulder_lift_joint”,…“r_upper_arm_roll_joint”,…'r_elbow_flex_joint',…“r_forearm_roll_joint”,…“r_wrist_flex_joint”,…“r_wrist_roll_joint”};
通过创建ROS创建腕关节轨迹设定点trajectory_msgs / JointTrajectoryPoint消息和指定所有7个关节作为载体的位置和速度。指定从一开始就作为一个ROS持续对象的时间。
% 1tjPoint1 = rosmessage (“trajectory_msgs / JointTrajectoryPoint”);tjPoint1。位置= 0(1、7);tjPoint1。速度= 0(1、7);tjPoint1。TimeFromStart = rosduration (1.0);% 2tjPoint2 = rosmessage(“trajectory_msgs / JointTrajectoryPoint”);tjPoint2.Positions = [-1.0 0.2 0.1 -1.2 -1.5 -0.3 -0.5];tjPoint2.Velocities =零(1,7);tjPoint2.TimeFromStart = rosduration(2.0);
创建与在轨迹点的对象阵列,并且将其分配给目标消息。发送使用操作客户的目标。该sendGoalAndWait(ROS工具箱)函数将阻止执行,直到PR2手臂完成执行轨迹
rGoalMsg.Trajectory.Points = [tjPoint1,tjPoint2];sendGoalAndWait(rArm,rGoalMsg);

创建另一个动作客户端向左臂发送命令。指定PR2机器人的联合名称。
[lArm, lGoalMsg] = rosactionclient(“l_arm_controller / joint_trajectory_action”);waitForServer(LARM);lGoalMsg.Trajectory.JointNames = {“l_shoulder_pan_joint”,…'l_shoulder_lift_joint',…“l_upper_arm_roll_joint”,…“l_elbow_flex_joint”,…“l_forearm_roll_joint”,…“l_wrist_flex_joint”,…“l_wrist_roll_joint”};
为左臂设定一个轨迹点。把它分配给目标信息,然后发送目标。
tjPoint3 = rosmessage(“trajectory_msgs / JointTrajectoryPoint”);tjPoint3.Positions = [1.0 0.2 -0.1 -1.2 -0.3 1.5 0.5];tjPoint3.Velocities =零(1,7);tjPoint3.TimeFromStart = rosduration(2.0);lGoalMsg.Trajectory.Points = tjPoint3;sendGoalAndWait(LARM,lGoalMsg);
计算末端执行器位置的逆运动学
在本节中,您将根据所需的末端执行器(PR2右夹持器)位置计算关节的轨迹。该inverseKinematics类计算所有需要的关节位置,这些位置可以通过action客户机作为轨迹目标消息发送。一个rigidBodyTree对象用于定义机器人参数,生成配置,并在MATLAB®中可视化机器人。
执行以下步骤:
从ROS网络获取PR2机器人的当前状态,并将其分配给a
rigidBodyTree对象在MATLAB®中与机器人一起工作。定义末端执行目标姿势。
使用这些关节位置以确保适当的溶液可视化的机器人配置。
使用反向运动学来计算目标末端执行器的姿态共同立场。
关节的轨迹位置发送到服务器命令实际的PR2机器人ROS行动。
创建一个刚体树MATLAB®
加载一个PR2机器人作为arigidBodyTree对象。该对象定义了机器人的所有运动学参数(包括关节极限)。
pr2 = exampleHelperWGPR2Kinect;
获取当前的国家机器人
创建一个订阅者从机器人获取关节状态。
jointSub = rossubscriber (“joint_states”);
获取当前联合状态消息。
jntState =接收(jointSub);
将来自联合状态消息的联合位置分配到配置结构的字段pr2对象的理解。
jntPos = exampleHelperJointMsgToStruct (pr2, jntState);
可视化当前机器人配置
用显示用给定的关节位置向量对机器人进行可视化。这应该与机器人的当前状态相匹配。
秀(PR2,jntPos)

属性:XLim: [-2] YLim: [-2] XScale: 'linear' YScale: 'linear' GridLineStyle: '-' Position: [0.1300 0.1100 0.7750 0.8150] Units: '归一化'显示所有属性
创建一个inverseKinematics从对象pr2机器人对象。逆运动学的目标是计算将夹具(即末端执行器)置于所需姿态的PR2臂的关节角。一个序列的末端执行器构成在一段时间内被称为轨迹。
在这个例子中,我们将只控制机器人的手臂。因此,我们对规划中的躯干抬关节严格的限制。
torsoJoint = pr2.getBody('torso_lift_link') .Joint;idx = strcmp ({jntPos。JointName}, torsoJoint.Name);torsoJoint。HomePosition = jntPos (idx) .JointPosition;torsoJoint。PositionLimits = jntPos (idx)。JointPosition + (1 e - 3, 1 e - 3);
创建inverseKinematics对象。
本土知识= inverseKinematics (“RigidBodyTree”pr2);
禁用随机重启以确保一致的IK解决方案。金宝搏官方网站
ik.SolverParameters。所有owRandomRestart = false;
指定目标姿态的每个部件上的公差的重量。
weights = [0.25 0.25 0.25 11 11 1];initialGuess = jntPos;%当前jnt pos作为初始猜测
指定有关任务的末端执行器的姿势。在这个例子中,PR2将达到罐放在桌子上,把握就可以了,它移动到不同的位置,并重新设置它。我们将使用inverseKinematics目的是计划运动平滑地从一个端部执行器的姿势到另一转换。
指定末端执行器的名称。
endEffectorName =“r_gripper_tool_frame”;
指定can的初始(当前)姿态和期望的最终姿态。
TCanInitial = trvec2tform([0.7, 0.0, 0.55]);TCanFinal = trvec2tform([0.6, -0.5, 0.55]);
限定相对希望的抓握当端部执行器和罐之间变换。
TGraspToCan = trvec2tform([0,0,0.08])* eul2tform(π/ 8,0,-pi]);
定义所需的笛卡尔轨迹的关键路径点。罐子应该沿着这条轨迹移动。可以将轨迹进行如下分解:
打开夹
从当前姿势移动末端执行器
T1使机器人会觉得舒服发起把握移动末端执行器
T1来TGrasp(随时掌握)关闭夹具和抢CAN
移动末端执行器
TGrasp来T2(举起罐头)移动末端执行器
T2来T3(移动可以不动心地)移动末端执行器
T3来TRelease(将易拉罐放在桌面上,准备释放)打开钳子,松开罐子
移动末端执行器
TRelease来T4(收回手臂)
TGrasp = TCanInitial * TGraspToCan;抓取罐时所需的末端执行器姿态T1 = TGrasp * trvec2tform ([0, 0, -0.1]);T2 = TGrasp * trvec2tform ([0, 0, -0.2]);T3 = TCanFinal * TGraspToCan * trvec2tform ([0, 0, -0.2]);TRelease = TCanFinal * TGraspToCan;%释放罐时所期望的端部执行器的姿势T4 = T3 * trvec2tform([ - 0.1,0,0]);
实际运动将被指定numWaypoints在一个序列中的关节位置,并通过ROS简单的动作的客户端发送到机器人。这些配置将使用被选择inverseKinematics使末端执行器的姿态从初始姿态插值到最终姿态的对象。
执行这个动作
指定动作的顺序。
motionTask = {'发布', T1, TGrasp'把握', T2, T3, TRelease,'发布', T4};
中指定的每个任务motionTask一个接一个。使用指定的辅助函数发送命令。
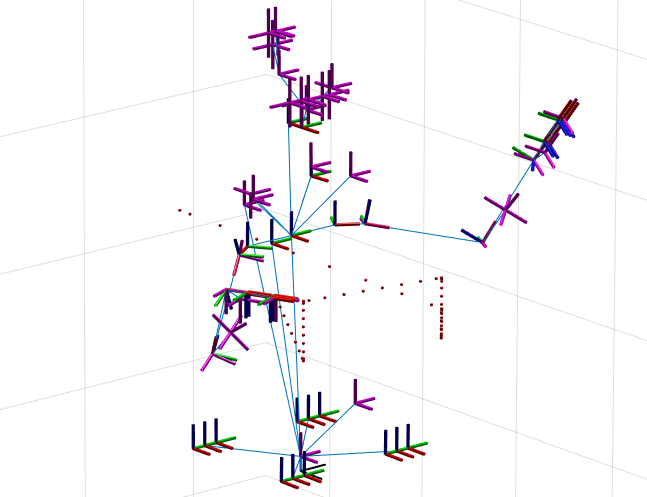
对于I = 1:长度(motionTask)如果比较字符串(motionTask {},'把握') exampleHelperSendPR2GripperCommand (“对”,0.0,1000,TRUE);继续结束如果比较字符串(motionTask {},'发布') exampleHelperSendPR2GripperCommand (“对”、0.1、1、真实);继续结束Tf = motionTask {};%获取当前的结合状态jntState =接收(jointSub);jntPos = exampleHelperJointMsgToStruct(pr2, jntState);getTransform(pr2, jntPos, endEffectorName);在关键路径点之间插入numWaypoints = 10;TWaypoints = examplehelperse3弹道(T0, Tf, numWaypoints);末端执行器姿态路径点%jntPosWaypoints = repmat(initialGuess, numWaypoints, 1);%关节位置路点rArmJointNames = rGoalMsg.Trajectory.JointNames;rArmJntPosWaypoints =零(numWaypoints,numel(rArmJointNames));%使用IK计算每个末端执行器位姿路径点的关节位置对于K = 1:numWaypoints jntPos = IK(endEffectorName,TWaypoints(:,:,k)时,权重,initialGuess);jntPosWaypoints(K,:) = jntPos;initialGuess = jntPos;%提取右手臂从jntPos关节位置rArmJointPos =零(大小(rArmJointNames));对于n = 1:length(rArmJointNames) rn = rArmJointNames{n};idx = strcmp ({jntPos。JointName}, rn);rArmJointPos (n) = jntPos (idx) .JointPosition;结束: rArmJntPosWaypoints (k) = rArmJointPos ';结束%对应于每个航点的时间点时间点= linspace(0、3、numWaypoints);%数值估计关节速度轨迹H = DIFF(时间点);H = H(1);jntTrajectoryPoints = arrayfun(@(〜)rosmessage(“trajectory_msgs / JointTrajectoryPoint”),零(1,numWaypoints));[〜,rArmJntVelWaypoints] =梯度(rArmJntPosWaypoints,H);对于m = 1:numWaypoints jntTrajectoryPoints(m)位置= rArmJntPosWaypoints (m:);jntTrajectoryPoints (m)。速度= rArmJntVelWaypoints (m:);jntTrajectoryPoints (m)。TimeFromStart = rosduration(时间点(m));结束%在MATLAB可视化机器人的运动和端部执行器的轨迹(R)持有在对于J = 1:numWaypoints显示(PR2,jntPosWaypoints(J,:),“PreservePlot”、假);exampleHelperShowEndEffectorPos (TWaypoints (:,:, j));drawnow;暂停(0.1);结束发送右臂轨迹给机器人rGoalMsg.Trajectory。点= jntTrajectoryPoints;sendGoalAndWait (rArm rGoalMsg);结束


总结
移动手臂回到开始的位置。
exampleHelperSendPR2GripperCommand(“r”, 0.0, 1) rGoalMsg.Trajectory。点= tjPoint2;sendGoal (rArm rGoalMsg);
调用rosshutdown关机ROS网络和断开从机器人。
rosshutdown
使用NodeURI http://192.168.233.1:57169/关闭全局节点/matlab_global_node_59258
您也可以从以下列表中选择一个网站: