主要内容
操纵器算法设计
刚体模型,逆运动学,动力学,轨迹
这些机器人系统Toolbox™Manipulator算法支持与铰接式串行链路机器人相关的工作流程。金宝app使用a定义机器人模型刚性小组细胞由刚体组成的物体作为用于连接和运动的结构元件和接头。该机器人表示包含运动学约束和动态属性。使用联合和任务空间运动模型从输入命令生成机器人运动。
如果您有机器人描述为URDF文件或Simscape™MultiBody™模型,您可以使用它使用ImportRobot.。
执行逆运动学以基于所需的末端执行器位置获取联合配置。应用额外的外部约束,如在工作区上针对瞄准相机。为执行计划路径生成平滑轨迹。检测冲突或计算间隙以避免在执行路径时碰撞。
- 机器人模型
刚体树模型,前瞻性运动学,动态,联合和任务空间运动模型 - 逆运动学
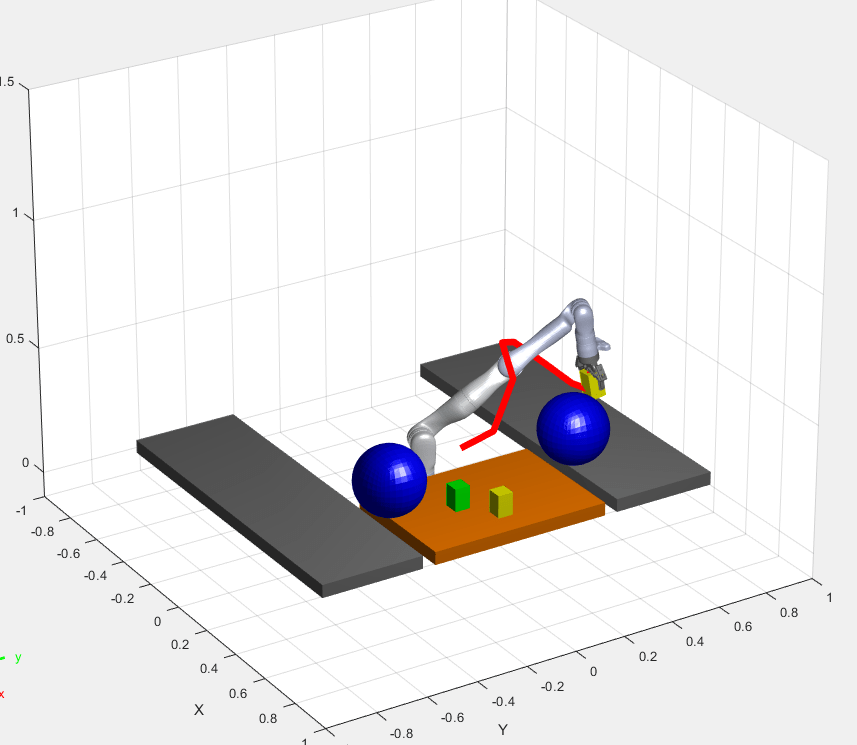
操纵器逆运动学,运动约束 - 操纵器运动计划
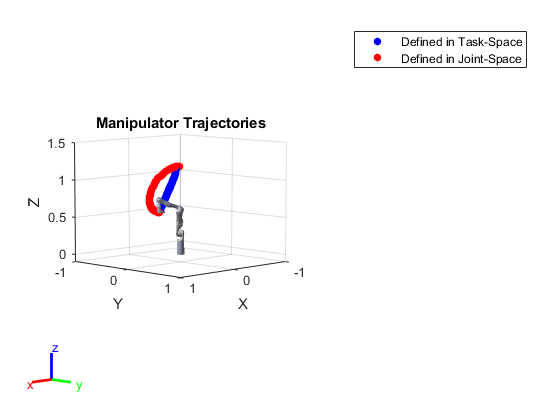
路径规划使用RRT和刚体树木 - 轨迹生成和遵循
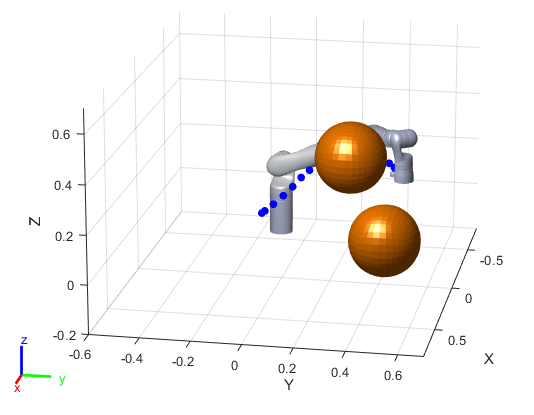
控制操纵器关节以跟踪轨迹 - 碰撞检测
碰撞几何网格,碰撞避免和间隙
特色例子

您还可以从以下列表中选择一个网站: