主要内容
操纵器运动计划
路径规划使用RRT和刚体树木
操纵器运动规划涉及基于机器人的自由度(DOF)和机器人模型的运动限制的高维空间中规划路径。机器人模型的运动约束被指定为一个刚性小组细胞目的。使用Manipulatorrt.使用快速探索的随机树(RRT)算法计划联合空间中的路径。
职能
Manipulatorrt. |
使用双向RRT计划刚体树的动作 |
计划 |
使用RRT进行操纵器的计划路径 |
插 |
沿RRT的路径插入状态 |
缩短 |
修剪边缘以缩短来自RRT的路径 |
WorkspaceGoAlRegion. |
定义最终效应器目标的工作空间区域姿势 |
样本 |
样品末端效应器在世界框架中姿势 |
表演 |
可视化工作空间界限,参考帧和偏移帧 |
话题
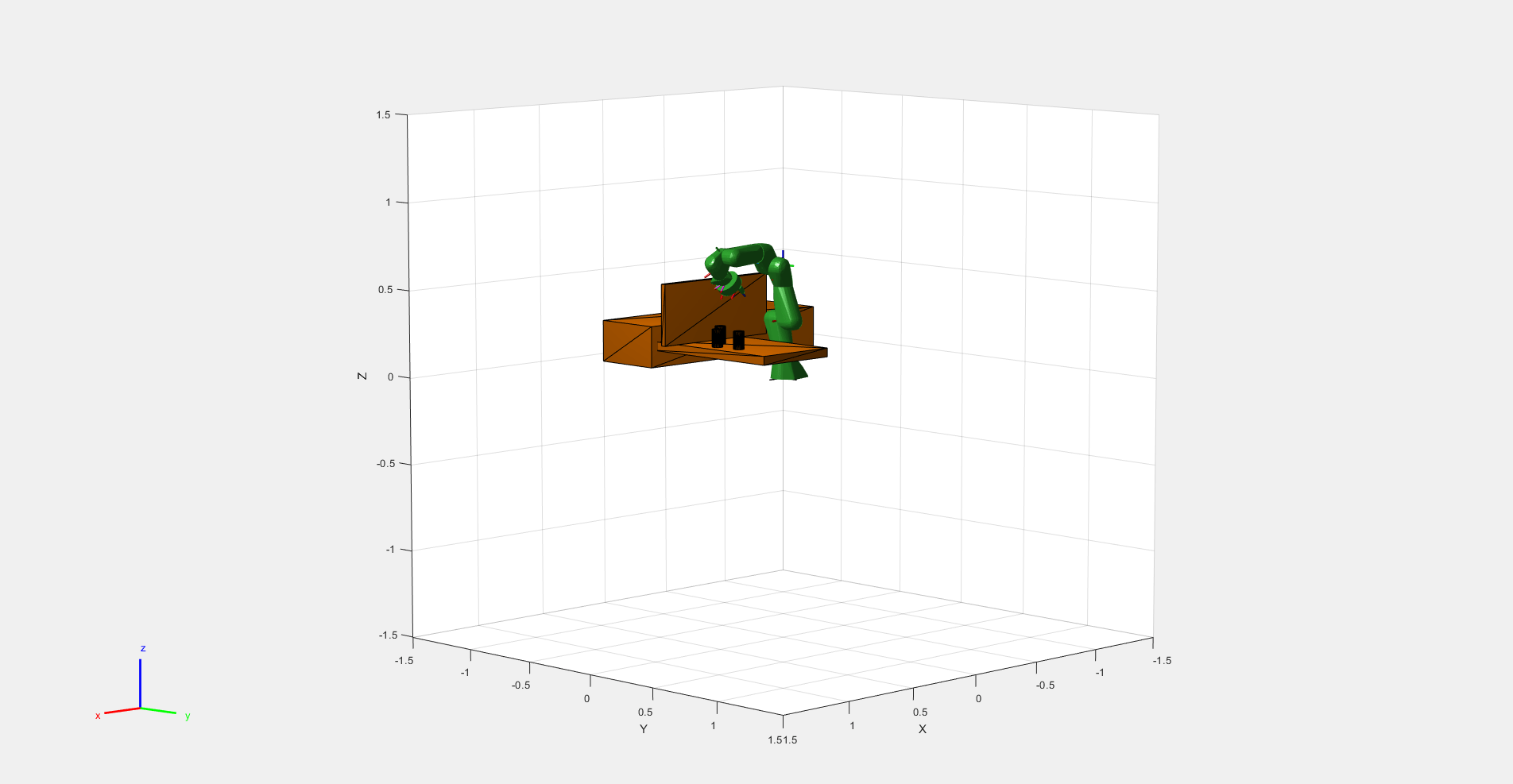
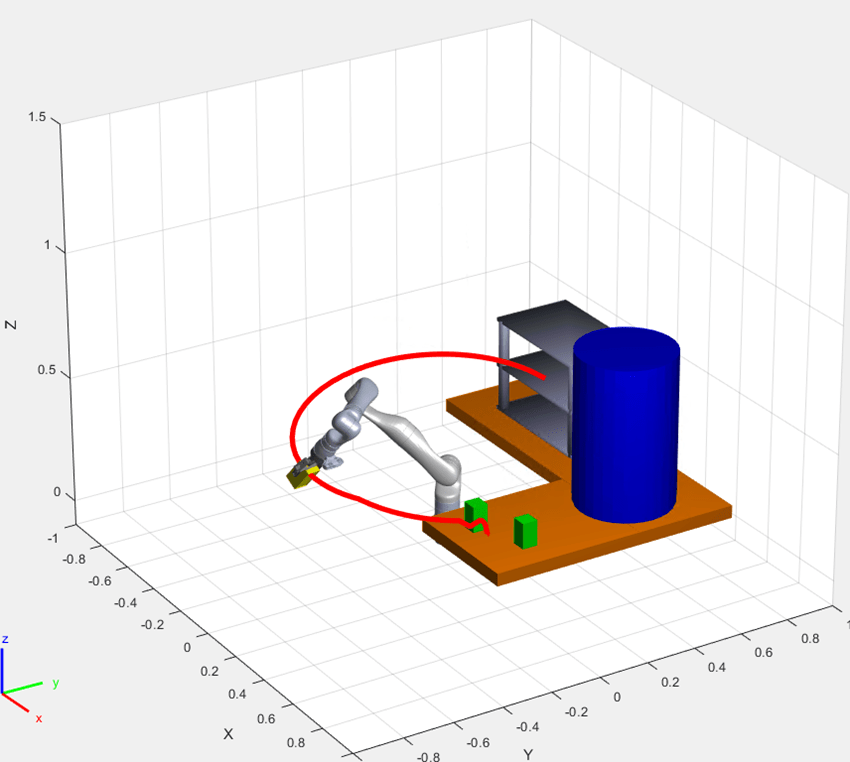
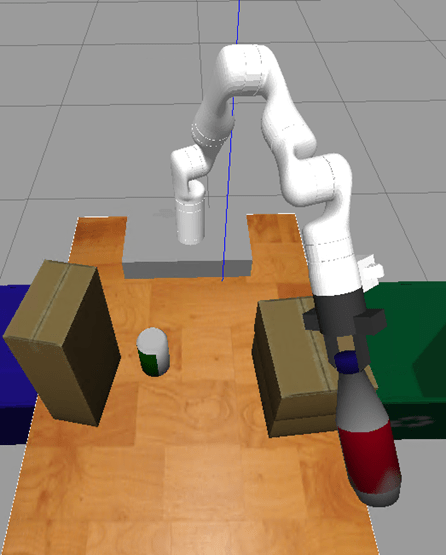
使用操纵器在环境中挑选对象可能需要路径规划算法,如快速探索随机树策划器。
使用RRT Planner和Matlab的StateFlow挑选工作流程
此示例显示如何为kinova®In3等机器人操纵器设置端到端的拾取工作流。
设置端到端的挑选,并将工作流作为Kinova®Gen3这样的机器人操纵器。
特色例子
您还可以从以下列表中选择一个网站: