主要内容
机械手运动规划
使用RRT和刚体树进行路径规划
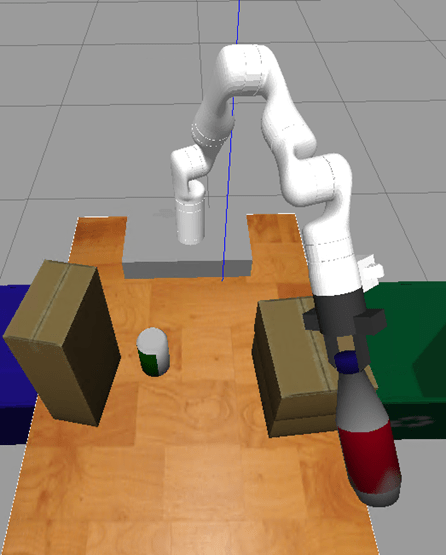
机械手运动规划是基于机器人的自由度和机器人模型的运动学约束在高维空间中进行路径规划。机器人模型的运动学约束为arigidBodyTree对象。使用manipulatorRRT利用快速探索随机树(RRT)算法规划关节空间中的路径。
对象
manipulatorRRT |
利用双向RRT对刚体树进行运动规划 |
manipulatorStateSpace |
刚体树机器人模型的状态空间 |
manipulatorCollisionBodyValidator |
验证刚体树的碰撞体状态 |
workspaceGoalRegion |
定义末端执行器目标位姿的工作区域 |
功能
主题
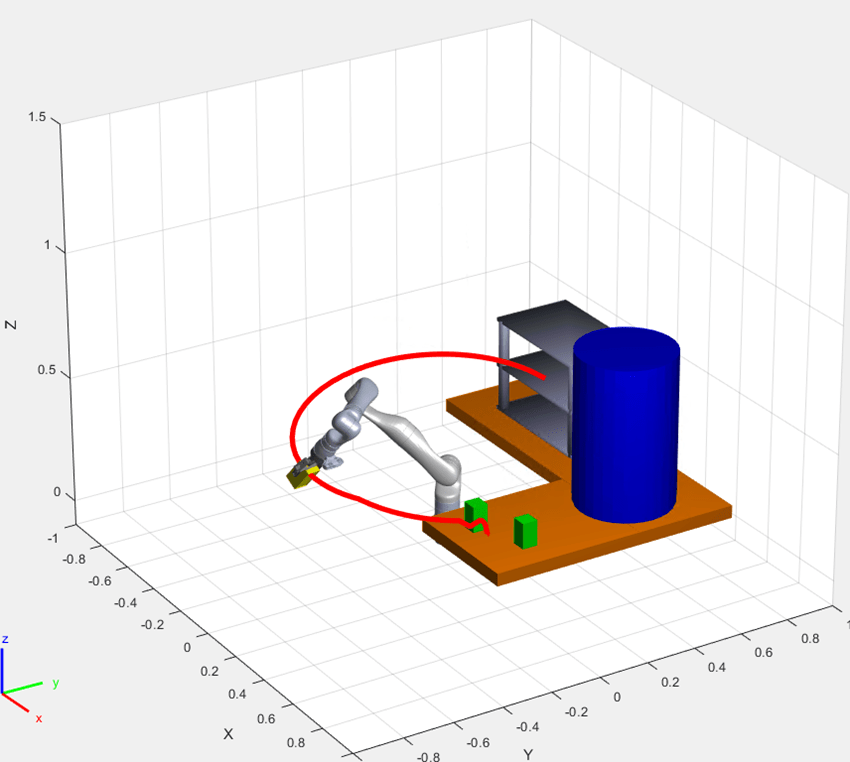
使用机械手在环境中选择和放置对象可能需要像快速探索随机树规划器这样的路径规划算法。
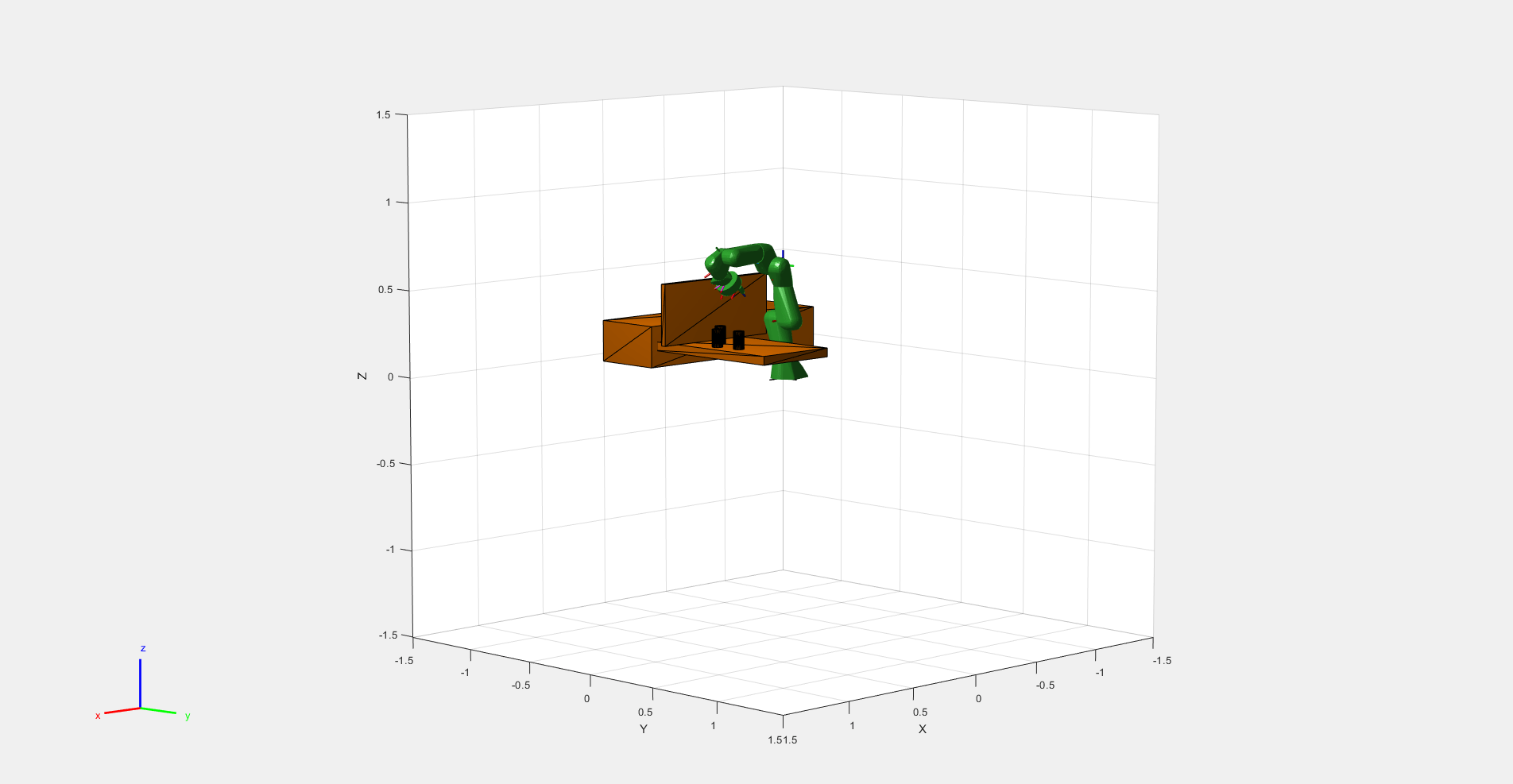
基于MATLAB的RRT Planner和Stateflow的拣选和放置工作流
这个例子展示了如何为KINOVA®Gen3这样的机器人机械手设置端到端取放工作流程。
为KINOVA®Gen3这样的机器人机械手设置端到端取放工作流程。
使用快速探索随机树(RRT)算法等基于采样的规划器来规划机械手的路径。
特色的例子
你也可以从以下列表中选择一个网站: