同时使用鲁棒控制稳定
下面的例子使用了鲁棒控制工具箱™命令ucover和musyn为家庭设计一个高性能的控制器不稳定的植物。
工厂的不确定性
名义植物模型由一阶不稳定的系统。
Pnom =特遣部队(2 (1 2));
摄动的家庭植物的变化Pnom。所有的植物都有一个不稳定极点但这杆的位置因家庭而异。
p1 = Pnom *特遣部队(1,。06年1]);%的额外延迟p2 = Pnom *特遣部队([-。02 1]、[。02 1]);%时间延迟p3 = Pnom *特遣部队(50 ^ 2,[1 2 *。1 50 * 50 ^ 2]);%高频共振p4 = Pnom *特遣部队(70 ^ 2,[1 2 *。2 * 70 70 ^ 2]);%高频共振p5 =特遣部队(2.4,-2.2 [1]);%杆/获得迁移p6 =特遣部队(1.6,-1.8 [1]);%杆/获得迁移
覆盖模型的不确定性
反馈设计的目的,我们需要更换这组模型用一个不确定的植物模型的行为包括的范围p1通过p6。这是一个使用的命令ucover。这个命令需要一个数组的线性时不变模型Parray和名义模型Pnom和模型的区别Parray-Pnom乘法系统动力学的不确定性。
因为ucover预计的数组模型,使用堆栈命令来收集植物模型p1通过p6到一个数组中。
Parray =堆栈(1,p1, p2, p3, p4, p5, p6);
下一步,使用ucover“覆盖”行为的范围Parray与一个不确定的模型形式
P = Pnom * (1 + Wt *δ)
所有的不确定性都集中在“未建模动态”δ(一个ultidyn对象)。因为获得的δ所有的频率都是一致有界的,1,“塑造”过滤器吗Wt用于捕获随频率的相对数量的不确定性。这种滤波器也称为权重函数的不确定性。尝试一个四阶滤波器Wt对于这个示例:
orderWt = 4;Parrayg =朋友(Parray logspace (1、3、60));[P,信息]= ucover (Parrayg、Pnom orderWt,“InputMult”);
由此产生的模型P是一个单,对于不确定的状态与标称值(USS)对象Pnom。
P
不确定连续系统的状态空间模型1输出,输入5个州。模型不确定性包含以下模块:Parrayg_InputMultDelta:不确定1 x1 LTI,峰值增益= 1,1 P事件类型。NominalValue”的名义价值和“P。不确定性”与不确定的交互元素。
特遣部队(P.NominalValue)
ans = 2 - - - - - - s - 2连续时间传递函数。
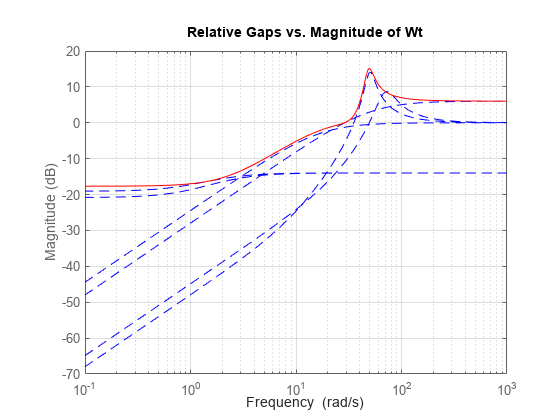
波德级证实整形滤波器的阴谋Wt“覆盖”相对变异植物的行为。作为频率的函数,这种不确定性水平是30%,5 rad /秒(-10 db = 0.3), 50% 10 rad /秒,100%超过29 rad /秒。
Wt = Info.W1;bodemag ((Pnom-Parray) / Pnom,“b——”Wt,“r”);网格标题(的相对差距与Wt的级)
创建开环设计模型
为不确定工厂设计鲁棒控制器模型P,我们选择期望的闭环带宽和减少核电站对扰动的敏感性的输出。控制结构如下所示。的信号d和n是负载干扰和测量噪声。控制器使用噪声测量的输出y生成控制信号u。

图1:控制结构。
过滤器Wperf和Wnoise选择执行所需的带宽和一些适当的转出。闭环传递函数[d; n]来y是
y = [Wperf * S Wnoise * T] [d; n]
在哪里S = 1 / (1 + PC)和T = PC / (1 + PC)灵敏度和互补的灵敏度函数。如果我们设计一个控制器,使得闭环增益[d; n]来y低于1,那么
< 1 / S | | | Wperf |, T | | < 1 / | Wnoise |
通过选择适当的级配置文件Wperf和Wnoise,我们可以加强小敏感性(年代带宽和足够的转出(内)T)外的带宽。
例如,选择Wperf作为一个一阶低通滤波器的直流增益和500获得交叉在所需的带宽desBW:
desBW = 4.5;desBW Wperf =补足重量的东西(500年,0.33);特遣部队(Wperf)
ans = 0.33 + 4.248 - - - - - - - - - - - - - - - - s + 0.008496连续时间传递函数。
同样,选择Wnoise作为一个二阶高通滤波器1级的10 * desBW。这将迫使开环增益个人电脑与斜率为2碾轧频率10 * desBW。
NF = (10 * desBW) / 20;%分子转角频率DF = (10 * desBW) * 50;%分母转角频率Wnoise =特遣部队([1 / NF ^ 2 2 * 0.707 / NF 1], [1 / DF ^ 2 2 * 0.707 / DF 1]);Wnoise = Wnoise / abs (freqresp (Wnoise 10 * desBW))
Wnoise = 0.1975 s ^ 2 + 0.6284 + 1 - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - 7.901 e-05 s ^ 2 + 0.2514 + 400连续时间传递函数。
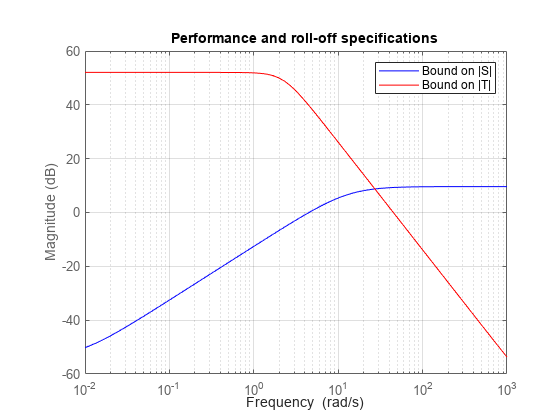
验证范围1 / Wperf和1 / Wnoise在年代和T做执行所需的带宽和碾轧。
bodemag (1 / Wperf,“b”1 / Wnoise,“r”{1飞行,1 e3}),网格标题(“性能和碾轧规范”)传说(绑定在|年代|,“T | |绑定”,“位置”,“东北”)
下一个使用连接建立开环互连(没有控制器框图如图1块)。指定每一块出现在图1中,名称每个块的信号进出,让连接做连接:
P。u=“u”;P。y=“yp”;Wperf。u =' d ';Wperf。y =“Wperf”;Wnoise。u =“n”;Wnoise。y =“Wnoise”;S1 = sumblk (“e = -ym”);S2 = sumblk (“y = yp + Wperf”);S3 = sumblk (“ym = y + Wnoise”);G =连接(P Wperf Wnoise, S1, S2、S3, {' d ',“n”,“u”},{“y”,“e”});
G是3-input 2-output不确定系统适合鲁棒控制器与musyn合成。

鲁棒控制器合成
自动化的设计进行稳健设计命令musyn。目标带宽4.5 rad / s。
纽约= 1;ν= 1;[C, muPerf] = musyn (G,纽约,ν);
D-K迭代总结:- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -鲁棒性能符合订单- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - Iter K步峰μ适合D 1 353.6 249.5 251.9 0 2 3 1.98 1.604 1.621 70.74 - 9.964 10.05 - 4 8 4 6 10 5 1.091 1.091 1.1 1.164 1.164 1.188 1.048 1.048 1.054 10 7 10 8 1.018 1.018 1.026 1.028 1.028 1.034 1.014 1.014 1.018 8 9 10 1.012 1.012 1.017十佳实现健壮的性能:1.01
当鲁棒性能指标muPerf接近1,控制器达到目标闭环带宽和碾轧。作为一个经验法则,如果muPerf小于0.85,那么可以改进性能,如果muPerf大于1.2,然后期望的闭环带宽不是实现指定工厂的不确定性。
在这里muPerf大约是1的目标得到满足。由此产生的控制器C有18个州:
大小(C)
1输出,状态空间模型1的输入,16个州。
您可以使用减少和musyn性能命令来简化这个控制器。1到17的订单计算近似。
NxC =订单(C);Cappx =减少(C, 1: NxC);
对于每一个降维控制器,使用musyn性能计算并比较健壮的性能指标muPerf。保持最低的控制器性能不低于1.05 *muPerf,性能下降5%或更少。
为k = 1: NxC Cr = Cappx (:,:, k);% k阶控制器bnd = musynperf(融通(G, Cr));如果bnd。UpperBound < 1.05 * muPerf打破%中止与第一控制器满足性能目标结束结束订单(Cr)
ans = 6
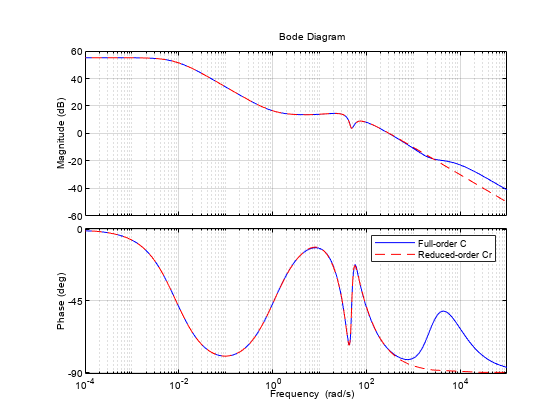
这产生了一个6阶控制器Cr与类似的性能。比较Cr与全阶控制器C。
选择= bodeoptions;opt.Grid =“上”;opt.PhaseMatching =“上”;bodeplot (C,“b”、铬、“r——”、选择)传说(“完整的订单C”,“降维Cr”,“位置”,“东北”)
鲁棒控制器验证
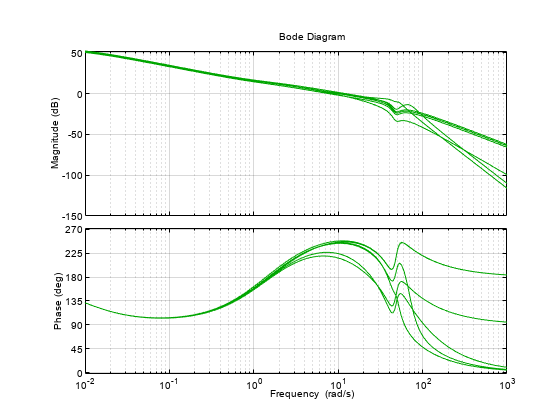
绘制开环反应的模型p1通过p6与简化控制器Cr。
bodeplot (Parray * Cr、‘g’,{1依照1 e3},选择);
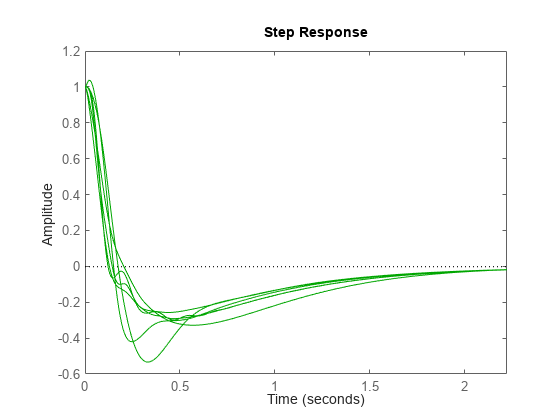
核电站情节一步扰动的响应输出。这些都是符合期望的闭环带宽和健壮的植物变化,如预期的强劲性能mu-value约1。
步骤(反馈(1,Parray * Cr),‘g’10 / desBW);
不同目标的闭环带宽
相同的设计过程可以重复不同的闭环带宽值desBW。这样做会产生以下结果:
使用
desBW= 8产生一个好的设计和健壮的性能muPerf1.09。对面的一步反应Parray家庭符合8 rad / s的闭环带宽。使用
desBW= 20产量和健壮的性能设计muPerf1.35。这预计,因为这个目标带宽非常大的工厂附近的不确定性。一些步骤反应的植物p1,…, p6实际上是不稳定的。使用
desBW= 0.3收益率和健壮的性能设计muPerf2.2。这是预期的,因为Wnoise征收碾轧过去3 rad / s,这是太接近的固有频率不稳定极点(2 rad / s)。换句话说,适当的控制不稳定动力学比指定需要更高的带宽。