订阅
库:
ROS工具箱/ ROS
描述
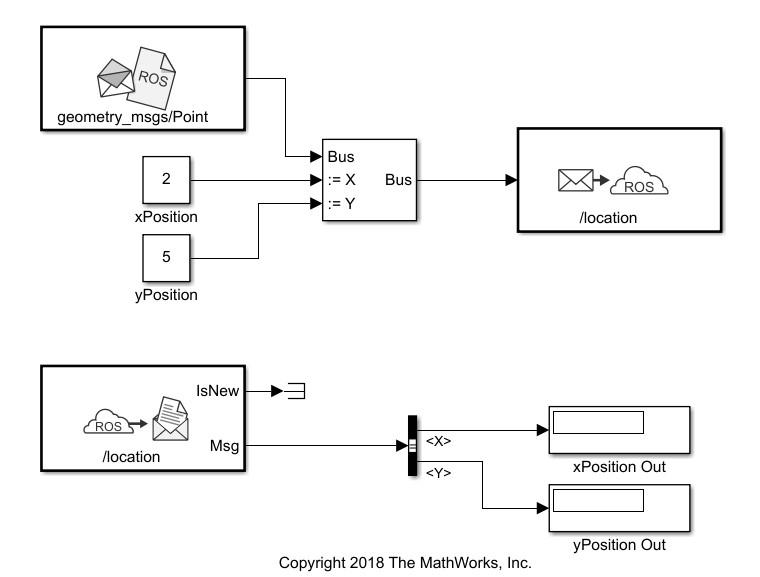
的订阅块创建一个模型金宝app®nonvirtual总线对应于指定的ROS消息类型。块使用仿真软件模型的节点创建一个ROS用户为一个特定的主题。金宝app这个节点模型运行时创建和删除模型时终止。如果模型没有一个节点,创建一个块。
每个模拟步骤,块检查新的消息可以在特定的主题。如果有新消息,块检索消息,并将其转换为仿真软件总线信号。金宝app的味精端口输出这个新消息。如果一个新消息不可用,味精去年收到ROS的信息输出。如果没有收到消息开始以来的模拟,味精输出一个空白的消息。

港口
输出
参数
提示
你也可以设置地址ROS的主人和节点主机通过单击配置网络地址链接。
扩展功能
版本历史
介绍了R2019b