文档帮助中心文档
分析滤波器的频域和时域响应。在复平面上可视化滤波器极点和零点。
全部展开
腹肌
角
freqz
grpdelay
phasedelay
phasez
打开
zerophase
zplane
impz
impzlength
stepz
filtord
filternorm
firtype
isallpass
isfir
islinphase
ismaxphase
isminphase
趋于稳定
频率响应
计算和显示IIR和FIR低通、高通和带通滤波器的频率响应。
相位响应
提取滤波器的相位响应。
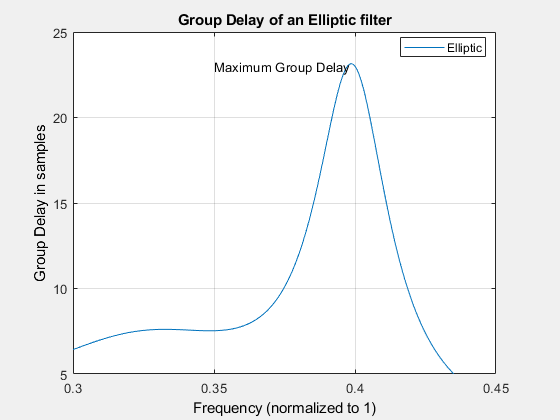
组延迟和相位延迟
测量滤波器的平均时延作为频率的函数。
Zero-Pole分析
找出并形象化一个线性系统的极点和零点。
脉冲响应
生成并显示一个简单滤波器的脉冲响应。
补偿FIR滤波器引入的延迟
使用索引来抵消滤波引入的时移。
补偿IIR滤波器引入的延迟
当保持相位信息完整至关重要时,消除滤波引入的延迟和失真。
通过使用过滤器可视化工具,在单个图形窗口中使用多个过滤器分析功能。
用切比雪夫I型设计设计一个简单的数字三向扬声器模型。想象滤波器的极点、零点和频率响应。
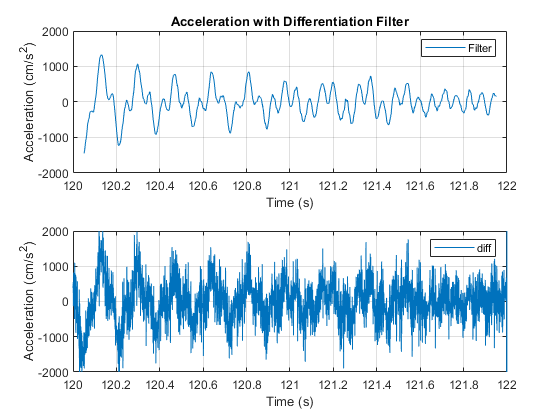
使用微分器滤波器在不放大噪声的情况下对信号进行微分。
你点击了一个对应于这个MATLAB命令的链接:
在MATLAB命令窗口中输入命令来运行该命令。Web浏览器不支持MATLAB命令。金宝app
选择一个网站,在可用的地方获得翻译的内容,并查看当地的活动和优惠。根据您的地理位置,我们建议您选择:.
您也可以从以下列表中选择网站:
选择中国网站(中文或英文)以获得最佳的网站表现。其他MathWorks国家网站没有针对从您的位置访问进行优化。
联系当地办事处