filtfiltgydF4y2Ba
零相位数字滤波gydF4y2Ba
语法gydF4y2Ba
描述gydF4y2Ba
ygydF4y2Ba= filtfilt (gydF4y2BabgydF4y2Ba,gydF4y2Ba一个gydF4y2Ba,gydF4y2BaxgydF4y2Ba)gydF4y2BaxgydF4y2Ba在正反两个方向上。对正向数据进行过滤后,gydF4y2BafiltfiltgydF4y2Ba将过滤后的序列倒转并通过过滤器将其运行回来。结果具有以下特点:gydF4y2Ba
零相位失真。gydF4y2Ba
一个滤波器传递函数等于原始滤波器传递函数的大小的平方。gydF4y2Ba
指定的过滤器顺序的两倍gydF4y2Ba
bgydF4y2Ba和gydF4y2Ba一个gydF4y2Ba.gydF4y2Ba
filtfiltgydF4y2Ba通过匹配初始条件最小化启动和结束瞬态。不要使用gydF4y2BafiltfiltgydF4y2Ba微分器和Hilbert FIR滤波器,因为这些滤波器的操作严重依赖于它们的相位响应。gydF4y2Ba
ygydF4y2Ba= filtfilt (gydF4y2Ba紧急求救信号gydF4y2Ba,gydF4y2BaggydF4y2Ba,gydF4y2BaxgydF4y2Ba)gydF4y2BaxgydF4y2Ba,使用矩阵表示的二阶分段(双四)滤波器gydF4y2Ba紧急求救信号gydF4y2Ba以及比例值gydF4y2BaggydF4y2Ba.gydF4y2Ba
ygydF4y2Ba= filtfilt (gydF4y2BadgydF4y2Ba,gydF4y2BaxgydF4y2Ba)gydF4y2BaxgydF4y2Ba,使用数字滤波器,gydF4y2BadgydF4y2Ba.使用gydF4y2BadesignfiltgydF4y2Ba生成gydF4y2BadgydF4y2Ba基于频率响应规范。gydF4y2Ba
例子gydF4y2Ba
心电图波形的零相位滤波gydF4y2Ba
零相位滤波有助于将滤波后的时间波形中的特征精确地保留在未滤波信号中出现的位置。gydF4y2Ba
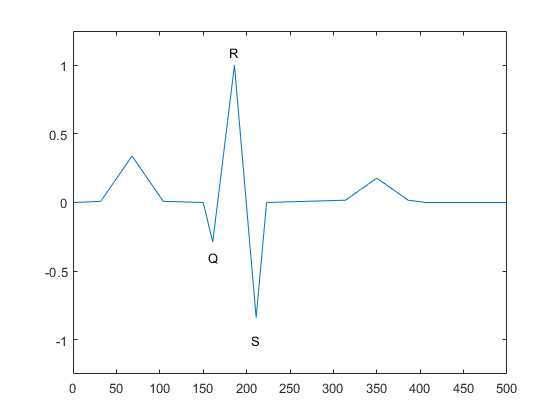
使用gydF4y2BafiltfiltgydF4y2Ba对合成心电图(ECG)波形进行零相位滤波。生成波形的函数在示例的最后。QRS复合体是心电图的一个重要特征。从160点开始。gydF4y2Ba
wform =心电图(500);Plot (wform) axis([0 500 -1.25 1.25]) text(155,-0.4,gydF4y2Ba“问”gydF4y2Ba1.1)文本(180年,gydF4y2Ba“R”gydF4y2Ba1)文本(205年,gydF4y2Ba“年代”gydF4y2Ba)gydF4y2Ba
用附加噪声损坏心电图。重置随机数生成器以获得可重复的结果。构造一个低通FIR等纹波滤波器,利用零相位和常规滤波对噪声波形进行滤波。gydF4y2Ba
rnggydF4y2Ba默认的gydF4y2BaX = wform' + 0.25*randn(500,1);d = designfilt (gydF4y2Ba“lowpassfir”gydF4y2Ba,gydF4y2Ba...gydF4y2Ba“PassbandFrequency”gydF4y2Ba, 0.15,gydF4y2Ba“StopbandFrequency”gydF4y2Ba, 0.2,gydF4y2Ba...gydF4y2Ba“PassbandRipple”gydF4y2Ba, 1gydF4y2Ba“StopbandAttenuation”gydF4y2Ba现年60岁的gydF4y2Ba...gydF4y2Ba“DesignMethod”gydF4y2Ba,gydF4y2Ba“equiripple”gydF4y2Ba);x y = filtfilt (d);日元=过滤器(d, x);Subplot (2,1,1) plot([y y1]) title(gydF4y2Ba过滤后的波形的gydF4y2Ba)传说(gydF4y2Ba“零相位滤波”gydF4y2Ba,gydF4y2Ba“传统过滤”gydF4y2Ba)子图(2,1,2)gydF4y2Ba原始波形的gydF4y2Ba)gydF4y2Ba
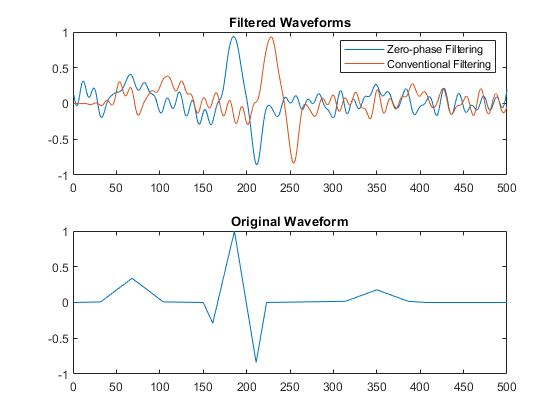
零相位滤波降低了信号中的噪声,同时保留了原信号中的QRS复波。传统滤波降低了信号中的噪声,但延迟了QRS复波。gydF4y2Ba
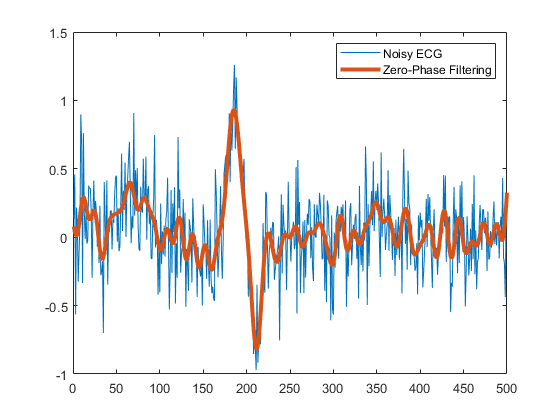
使用巴特沃斯二阶分段滤波器重复上述步骤。gydF4y2Ba
d1 = designfilt (gydF4y2Ba“lowpassiir”gydF4y2Ba,gydF4y2Ba“FilterOrder”gydF4y2Ba12gydF4y2Ba...gydF4y2Ba“HalfPowerFrequency”gydF4y2Ba, 0.15,gydF4y2Ba“DesignMethod”gydF4y2Ba,gydF4y2Ba“黄油”gydF4y2Ba);x, y = filtfilt (d1);次要情节(1,1,1)情节(x)gydF4y2Ba在gydF4y2Ba情节(y,gydF4y2Ba“线宽”gydF4y2Ba3)传说(gydF4y2Ba嘈杂的心电图的gydF4y2Ba,gydF4y2Ba“零相位滤波”gydF4y2Ba)gydF4y2Ba
这就是产生心电图波形的函数。gydF4y2Ba
函数gydF4y2Bax =心电图(左)gydF4y2Ba%心电图(ECG)信号发生器。gydF4y2Ba% ECG(L)产生长度为L的分段线性心电信号。gydF4y2Ba%gydF4y2Ba%的例子:gydF4y2Ba% x = ecg(500);gydF4y2Ba% y = sgolayfilt(x,0,3); / /点击图片%典型值为:d=0, F=3,5,9等。gydF4y2Ba% y5 = sgolayfilt(x,0,5); / /点击图片gydF4y2Ba% y15 = sgolayfilt(x,0,15);gydF4y2Ba% plot(1:length(x),[x y y5 y15]);gydF4y2Ba版权所有1988-2002 The MathWorks, Inc.gydF4y2Baa0 =[40 0 1 1 0, -34118, -99, 0, 2, 21岁,2,0,0,0);gydF4y2Ba%的模板gydF4y2Bad0 =[0, 27日,59,91131141163185195275307339357390440);A = a0 / max(a0);drawtext (d0 * L / d0(15), '买进'),coloryellow;gydF4y2Ba%缩放它们以适应长度LgydF4y2Bad (15) = L;gydF4y2Ba为gydF4y2BaI =1:14, m = d(I): d(I +1) - 1;斜率= (a(i+1) - a(i) / (d(i+1) - d(i))X (m+1) = a(i) + slope * (m - d(i));gydF4y2Ba结束gydF4y2Ba结束gydF4y2Ba
输入参数gydF4y2Ba
输出参数gydF4y2Ba
参考文献gydF4y2Ba
[1] Gustafsson, F.“在前向后滤波中确定初始状态”gydF4y2BaIEEEgydF4y2Ba®gydF4y2Ba信号处理汇刊gydF4y2Ba.第44卷,1996年4月,988-992页。gydF4y2Ba
Sanjit K. MitragydF4y2Ba数字信号处理gydF4y2Ba.第二版。纽约:麦格劳-希尔出版社,2001。gydF4y2Ba
Oppenheim, Alan V., Ronald W. Schafer, and John R. Buck。gydF4y2Ba离散时间信号处理gydF4y2Ba.第二版。上鞍河,新泽西:普伦提斯霍尔,1999。gydF4y2Ba
扩展功能gydF4y2Ba
另请参阅gydF4y2Ba
designfiltgydF4y2Ba|gydF4y2BadigitalFiltergydF4y2Ba|gydF4y2BafftfiltgydF4y2Ba|gydF4y2Ba过滤器gydF4y2Ba|gydF4y2Bafilter2gydF4y2Ba
选择网站gydF4y2Ba
选择一个网站,在那里获得翻译的内容,并看到当地的活动和优惠。根据您的位置,我们建议您选择:gydF4y2Ba.gydF4y2Ba
选择gydF4y2Ba网站gydF4y2Ba你也可以从以下列表中选择一个网站:gydF4y2Ba
美洲gydF4y2Ba
- 美国拉丁gydF4y2Ba(西班牙语)gydF4y2Ba
- 加拿大gydF4y2Ba(英语)gydF4y2Ba
- 美国gydF4y2Ba(英语)gydF4y2Ba
欧洲gydF4y2Ba
- 比利时gydF4y2Ba(英语)gydF4y2Ba
- 丹麦gydF4y2Ba(英语)gydF4y2Ba
- 德国gydF4y2Ba(德语)gydF4y2Ba
- 西班牙gydF4y2Ba(西班牙语)gydF4y2Ba
- 芬兰gydF4y2Ba(英语)gydF4y2Ba
- 法国gydF4y2Ba(法语)gydF4y2Ba
- 爱尔兰gydF4y2Ba(英语)gydF4y2Ba
- 意大利gydF4y2Ba(意大利语)gydF4y2Ba
- 卢森堡gydF4y2Ba(英语)gydF4y2Ba
- 荷兰gydF4y2Ba(英语)gydF4y2Ba
- 挪威gydF4y2Ba(英语)gydF4y2Ba
- 奥地利gydF4y2Ba(德语)gydF4y2Ba
- 葡萄牙gydF4y2Ba(英语)gydF4y2Ba
- 瑞典gydF4y2Ba(英语)gydF4y2Ba
- 瑞士gydF4y2Ba
- 联合王国gydF4y2Ba(英语)gydF4y2Ba
亚太地区gydF4y2Ba
- 澳大利亚gydF4y2Ba(英语)gydF4y2Ba
- 印度gydF4y2Ba(英语)gydF4y2Ba
- 新西兰gydF4y2Ba(英语)gydF4y2Ba
- 中国gydF4y2Ba
- 日本gydF4y2Ba(日本語)gydF4y2Ba
- 한국gydF4y2Ba(한국어)gydF4y2Ba
