主要内容
invfreqs
从频率响应数据识别连续时间滤波器参数
语法
描述
例子
传递函数到频率响应转换
将一个简单的传递函数转换为频率响应数据,然后返回到原始滤波器系数。
A = [1 2 3 2 1 4];B = [1 2 3 2 3];[h, w] =频率(b, a, 64);(bb, aa) = invfreqs (h, w, 4、5)
bb =1×51.0000 2.0000 3.0000 2.0000 3.0000 3.0000 3.0000
aa =1×61.0000 2.0000 3.0000 2.0000 1.0000 4.0000
bb和aa相当于b和一个,分别。然而,系统不稳定的原因是aa具有实部为正的极点。观察两极bb和aa.
zplane (bb, aa)
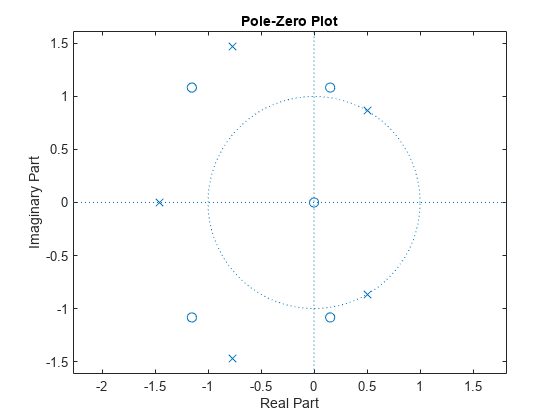
的迭代算法invfreqs找到系统的稳定近似。
(bbb, aaa) = invfreqs (h, w, 4、5、[],30)
bbb =1×50.6816 2.1015 2.6694 0.9113 -0.1218
aaa =1×61.0000 3.4676 7.4060 6.2102 2.5413 0.0001
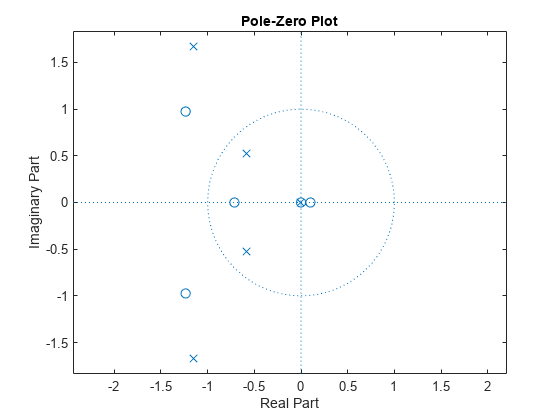
通过绘制新的极点来验证系统是稳定的。
zplane (bbb, aaa)
连续时间传递函数
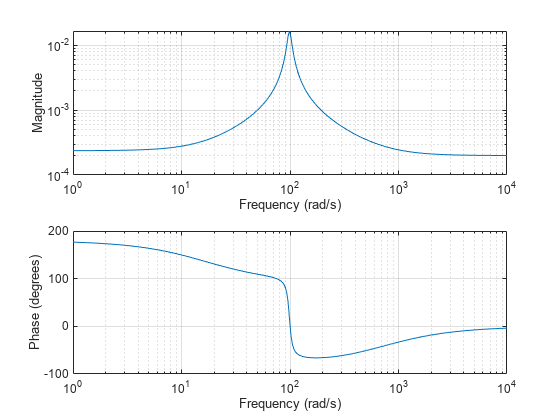
生成两个向量,玛格和阶段,模拟在实验室中收集的幅度和相位数据。也生成一个矢量,w的频率。
rng (“默认”) fs = 1000;t = 0:1 / fs: 2;杂志=周期图(罪(2 *π* 100 * t) + randn(大小(t)) / 10, [], [], fs);阶段= randn(大小(mag)) / 10;w = linspace (0 f / 2长度(mag)) ';
使用invfreqs将数据转换为连续时间传递函数。策划的结果。
[b] = invfreqs(玛格。* exp (1 j *阶段),w, 2, 2, [], 4);频率(b)
输入参数
输出参数
提示
当使用高频率建立高阶模型时,重要的是要缩放频率,除以一个因子,如存在的最高频率的一半w,从而得到的良好条件值一个和b.这相当于时间的缩放。
算法
默认情况下,invfreqs利用方程误差法从数据中确定最佳模型。这个发现b和一个在
通过建立一个线性方程组,并用MATLAB求解®\操作符。在这里一个(w(k)),B(w(k)是多项式的傅里叶变换一个和b,分别在频率处w(k),n频率点的个数(长度h和w).这个算法是基于李维的[1].在文献中提出了几个变量,其中权重函数wt很少关注高频。
优越的(“输出误差”)算法使用阻尼迭代搜索的高斯-牛顿方法[2],将第一个算法的输出作为初始估计。这解决了实际频率响应点与期望频率响应点之间的加权平方和误差最小的直接问题。
参考文献
[1] Levi, E. C.《复杂曲线拟合》(Complex-Curve Fitting)。愤怒的反式。在自动控制.AC-4卷,1959年,37-44页。
[2]小丹尼斯和r·b·施纳贝尔。无约束优化和非线性方程的数值方法。Englewood Cliffs, NJ: Prentice-Hall, 1983。
之前介绍过的R2006a
你也可以从以下列表中选择一个网站:
