oritingtrack.
跟踪并提取振动信号的阶数
句法
描述
[___] = ordertrack(使用一阶vold-kalman滤波器提取订单幅度,并返回来自先前语法的任何输出参数。X那FS.那rpm那订单那RPMREFIDX.)
oritingtrack(___)在没有输出参数的情况下,在当前图中绘制与时间相关的订单和RPM值。
例子
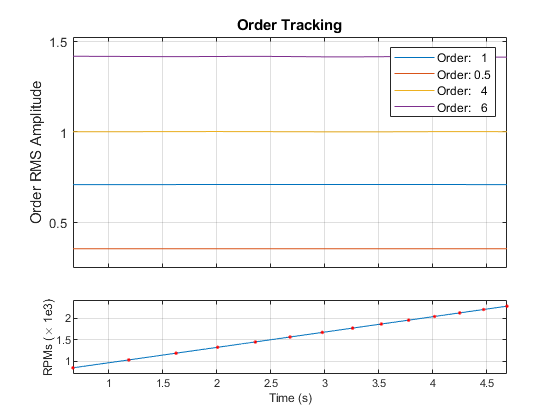
四阶啁啾的阶数
创建一个以600 Hz采样5秒的模拟信号。正在测试的系统在观测期间将其转速从每秒10转增加到40转(或,等价地,从每分钟600转增加到2400转)。
生成转速表读数。
fs = 600;t1 = 5;t = 0:1 / fs: t1;f0 = 10;f1 = 40;rpm = 60 * linspace (f0 f1长度(t));
信号由四个谐波相关的啁啾组成,阶数为1、0.5、4和6。啁啾的振幅分别为1、1/2、√2和2。为了产生啁啾,用梯形法则将相位表示为转速的积分。
O1 = 1;O2 = 0.5;O3 = 4;O4 = 6;A1 = 1;A2 = 0.5;A3 = SQRT(2);A4 = 2;pH = 2 * pi * cumtrapz(rpm / 60)/ fs;X = [A1 A2 A3 A4] * COS([O1 O2 O3 O4]'* pH);
提取并可视化订单的大小。
ORDERTRACK(X,FS,RPM,[O1 O2 O3 O4])
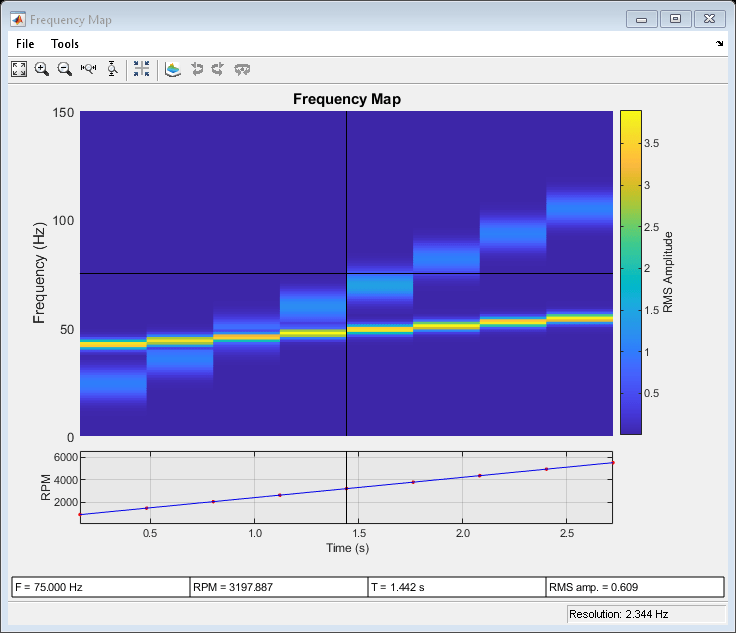
跟踪交叉订单
创建由对应于两个不同电动机的两个交叉订单组成的模拟振动信号。信号以300 Hz采样3秒。在测量期间,第一电动机将其旋转速度从10到100转的转速从10到100转(或等效,从600到600次转速)增加。第二电动机在同一时期期间每秒从50到70转的转速(或3000至4200次)增加。
fs = 300;nsamp = 3 * fs;rpm1 = linspace(10100年,nsamp) * 60;nsamp rpm2 = linspace(70)“* 60;
测量到的信号是1.2阶,振幅为2√2。对于第二个电机,信号的阶数为0.8,振幅为4√2。
4 x = [2] * sqrt(2)。* cos(2 *π* cumtrapz ([1.2 * 0.8 rpm1 * rpm2] / 60) / fs);
使第一个电机在频率范围的中间激发一个共振。
rs = (1 + 1. / (1 + linspace(-10、10、nsamp)。^ 4)“/ 2的(nsamp, 1)];x = (rs . * x, 2)总和;
使用以下命令可视化rpmfreqmap..
rpmfreqmap (x, fs, rpm1)
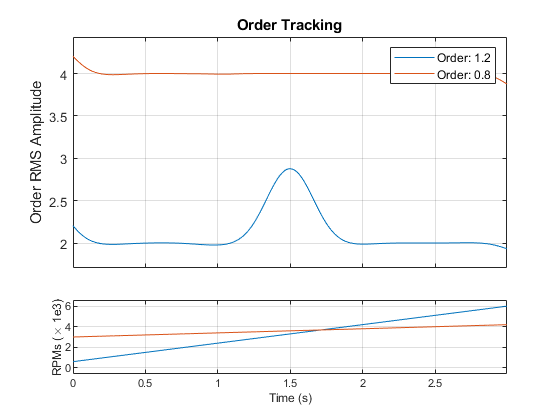
将两个电机的顺序幅度计算为RPM的函数。使用Vold-Kalman算法将交叉订单解耦。
Ordertrack (x,fs,[rpm1 rpm2],[1.2 0.8],[1 2],),'脱钩',真的)
直升机振动数据的跟踪顺序
分析放置在直升机驾驶舱的加速度计的模拟数据。
加载直升机数据。振动测量,VIB.,以500hz的频率采样10秒。对数据的检验表明,它具有线性趋势。消除这种趋势,以防止它降低订单估计的质量。
加载('helidata.mat') vib = dettrend (vib);
计算订单-RPM地图。指定订单分辨率为0.005。
[Map,Order,RPM,Time,Res] = RpMorderMap(VIB,FS,RPM,0.005);
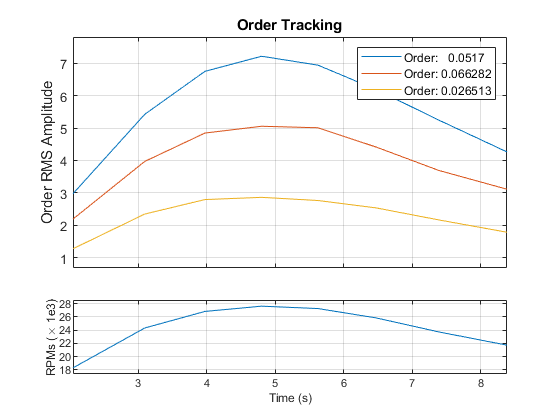
计算和绘制信号的平均阶谱。找出光谱中三个最高的峰。
(光谱,specorder) = orderspectrum(地图、订单);[~, pkords] = findpeaks (specorder频谱,“SortStr”那“下”那'npeaks'3);specorder findpeaks(光谱,“SortStr”那“下”那'npeaks'3)
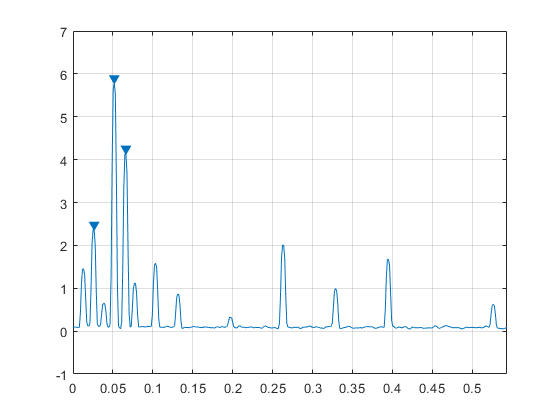
追踪三个最高山峰的振幅。
ordertrack(地图、秩序、转速、时间、pkords)
输入参数
输出参数
参考文献
[1]布兰德,安德斯。噪声和振动分析:信号分析和实验程序.英国奇切斯特:John Wiley & Sons, 2011。
[2] Feldbauer, Christian和Robert Höldrich。Vold-Kalman跟踪滤波器的实现——一个最小二乘问题数字音频效果COST G-6会议记录(DAFX-00).维罗纳,意大利,2000年12月7日至9日。
[3] Vold,Håvard和Jan Leuridan。“使用卡尔曼跟踪过滤器以极端旋转率跟踪高分辨率追踪。”冲击和振动.卷。2,1995,第507-515页。
[4] Tůma,霁ř我。沃尔德-卡尔曼多阶跟踪滤波器的算法第十四届国际喀尔巴阡山脉控制会议论文集,2013,第388-94页。https://doi.org/10.1109/CarpathianCC.2013.6560575.
扩展能力
你也可以从以下列表中选择一个网站:
