主要内容
orderwaveform
从振动信号中提取时域阶波形
语法
描述
例子
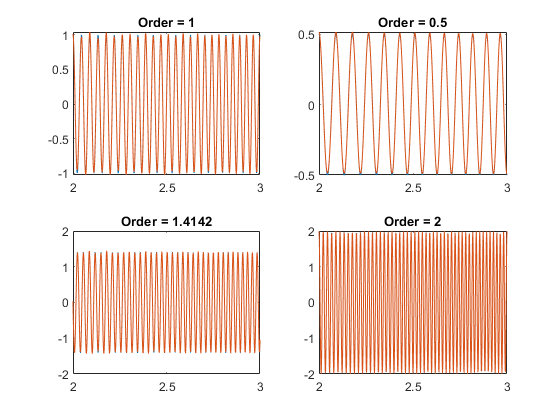
四阶啁啾的阶波形
在600 Hz采样采样5秒的模拟信号。正在测试的系统在观察期间将其从10到40转的转速从10到40次转速增加到(或等效,每分钟600至2400转)。
生成转速表读数。
FS = 600;t1 = 5;T = 0:1 / FS:T1;F0 = 10;F1 = 40;RPM = 60 * LINSPACE(F0,F1,长度(T));
信号由四个谐波相关的啁啾,订单1,1 / 2,χ2和2.啁啾的幅度分别为1,1 / 2,χ2和2。要生成啁啾,请使用梯形规则以表达阶段作为转速的积分。
=[1 0.5根号(2)2];Amp =[1 0.5√(2)2];ph = 2 *π* cumtrapz (rpm / 60) / fs;x (1:) = amp (1) * cos(奥德(1)* ph值);: x (2) = amp (2) * cos(奥德(2)* ph值);x (3:) = amp (3) * cos(奥德(3)* ph值);x (4:) = amp (4) * cos(奥德(4)* ph值);xsum = (x)之和;
重建构成信号的时域波形。
XREC = ORDERWAVEFORM(XSUM,FS,RPM,ORD);
可视化结果。放大瞬态衰减后发生的时间间隔。
为kj = 1:4子图(2,2,kj)绘图(t,x(kj,:),t,xrec(:,kj))标题([“订单”num2str(奥德(kj))) xlim (2 [3])结束
提取交叉指令波形
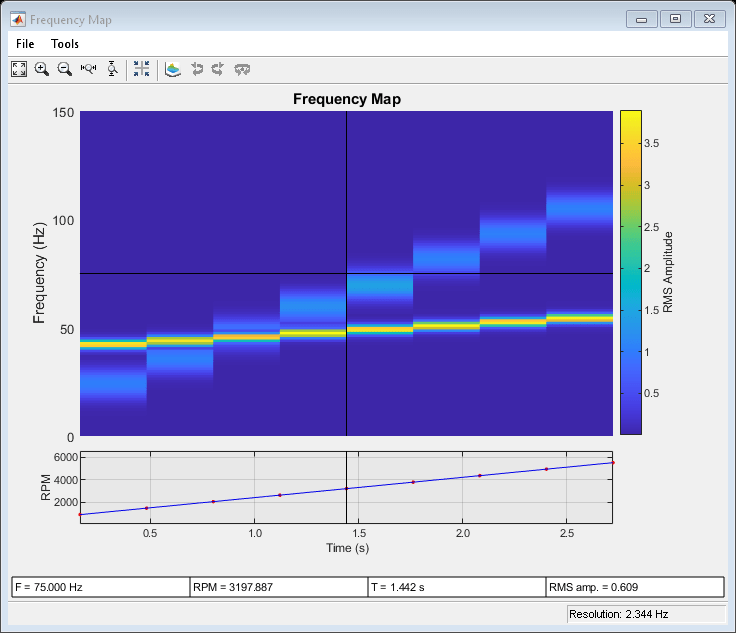
创建一个由两个交叉指令组成的模拟振动信号,对应于两个不同的电机。信号以300hz采样3秒。在测量过程中,第一个电机的转速从每秒10转增加到100转(或,等价的,从600转到6000转)。第二电机增加它的转速从50到70转每秒(或3000到4200转)在同一时期。
FS = 300;nsamp = 3 * fs;RPM1 = Linspace(10,100,NSAMP)'* 60;RPM2 = LINSPACE(50,70,NSAMP)'* 60;
测量信号的阶数为1.2,振幅为2√2关于第一个电机。对于第二个电机,信号的阶数为0.8,振幅为4√2.
X = [2 4] * SQRT(2)。* COS(2 * PI * CUMTRAPZ([1.2 * RPM1 0.8 * RPM2] / 60)/ FS);
使第一电动机在频率范围的中间激发共振。
y = (1 + 1. / (1 + linspace(-10、10、nsamp)。^ 4)“/ 2 (nsamp 1)]。* x;x = (y, 2)总和;
使用以下命令可视化rpmfreqmap.
RPMFreqMap(x,fs,rpm1)
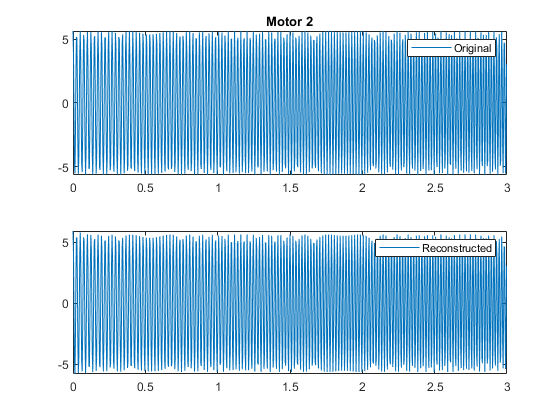
重建构成信号的时域波形。使用Vold-Kalman算法将交叉订单解耦。
XREC = ORDERWAVEFORM(X,FS,[RPM1 RPM2],[1.2 0.8],[1 2],“脱钩”,真正的);
绘制原始波形和重构波形。
为Kj = 1:2 figure(Kj) subplot(2,1,1) plot((0:nsamp-1)/fs,y(:, Kj))“原始”) 标题(['马达 'INT2STR(KJ)])子图(2,1,2)绘图((0:nsamp-1)/ fs,xrec(:,kj))图例('重建')结束
输入参数
输出参数
工具书类
[1] Feldbauer,Christian和Roberthöldrich。“实现Vold-Kalman跟踪过滤器 - 最小二乘问题。”成本G-6数字音频效应会议的诉讼程序(DAFX-00).2000年12月7日至9日,意大利维罗纳。
[2] 沃尔德、赫瓦尔德和扬·鲁里丹。“使用卡尔曼跟踪滤波器在极端回转率下进行高分辨率顺序跟踪。”冲击和振动.第二卷,1995年,第507-515页。
扩展功能
介绍了R2016b
您还可以从以下列表中选择一个网站:
