HL-20机身的修整和线性化
这是关于对HL-20的车辆的飞行控制系统的设计和调节一个五部分的示例系列1部分。这部分用修剪和机身的线性化交易。
HL-20模型
的HL-20模型是从在所描述的模型适配NASA HL-20升降机身(航空航天区块集).这是飞行器在飞行最后下降和着陆阶段的六自由度模型。在这一阶段不使用推力,机身正在滑向着陆跑道。
开放式系统('csthl20_trim')
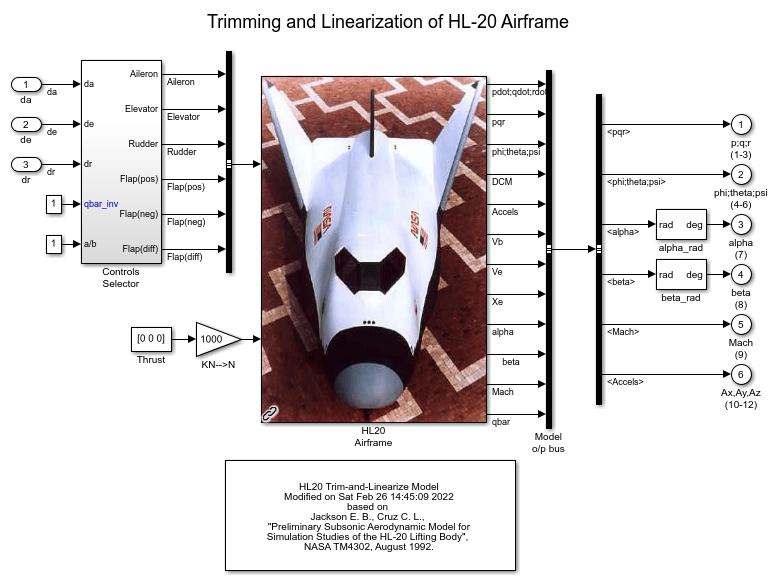
此版本的模型包括运动方程(EOM)、空气动力学表中的力和力矩计算、环境模型和“控制选择器”块,用于将副翼、升降舵和方向舵需求映射到六个控制面的偏转。
批修整
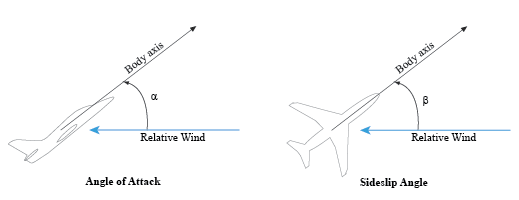
调整包括计算副翼、升降舵和方向舵的偏转,使机身上的力和力矩归零,或等效地保持身体速度ub、vb、wb和角速度p、q、r稳定。因为在下降过程中没有使用推力,一个自由度就丧失了,所以必须放松配平条件,让ub变化。挠度da、de、dr的配平值取决于机身相对于风的方向。这个方向的特征是迎角(AoA) alpha和侧滑角(AoS) beta。
和operspec和芬多普功能,您可以有效地计算覆盖车辆工作范围的(alpha,beta)值网格上的配平偏转。在这里,我们将模型修剪为8个α值,范围为-10到25度,5个β值,范围为-10到+10度。标称高度和速度设置为10000英尺和0.6马赫。
d2r=pi/180;%度到弧度m2ft=3.28084;%米到英尺海拔=10000/m2英尺;%标称高度马赫数=0.6;%标称马赫阿尔法向量=-10:5:25;%α-范围贝塔向量=-10:5:10;%β-范围[alpha,beta]=ndgrid(alpha_-vec,beta_-vec);%(α,β)网格
用operspec创建操作点规格的阵列。
opspec = operspec('csthl20_trim',尺寸(阿尔法));opspec(1)
工作点规范模型csthl20_trim。(时间变化分量评估的在时间t = 0)国家:----------(1)csthl20_trim / HL20机体/ 6DOF(欧拉角)/计算DCM及欧拉角/ PHI THETA psi的规格:DX = 0,初始猜测:0规格:DX = 0,初始猜测:-0.199规格:DX = 0,初始猜测:0(2)csthl20_trim / HL20机体/ 6DOF(欧拉角)/ p,q,R规格:DX = 0,初始猜测:0规格:DX = 0,初始猜测:0规格:DX = 0,初始猜测:0(3)csthl20_trim / HL20机体/ 6DOF(欧拉角)/ UB,VB,WB规格:DX = 0,初始猜测:203规格:DX = 0,初始猜测:0规格:DX = 0,初始猜测:23.3(4)csthl20_trim / HL20机体/ 6DOF(欧拉角)/ XE,咋,泽规格:DX = 0,初始猜测:-1.21e + 04规格:DX = 0,初始猜测:0规格:DX = 0,初始猜测:-3.05e + 03输入:----------(1.)csthl20_trim / DA初始猜测:0(2)csthl20_trim /去初始猜测:0(3)csthl20_trim / DR初始猜测:0输出:----------(1)csthl20_trim /磷; q; R(1-3)规格:无规格:无规格:无(2)csthl20_trim / PHI;峰; PSI(4-6)规格:无规格:无规格:无(3)csthl20_trim /α(7)规格:无(4)csthl20_trim /β(8)规格:无(5)csthl20_trim /马赫(9)规格:无(6)csthl20_trim / AX,AY,AZ(10-12)规格:无规格:无规格:无
为机身的每个方向指定平衡条件。为此:
通过固定的输出α和β,以他们期望的值来指定方向。
通过马赫输出固定到0.6指定机身速度。
标记角速率P,Q,R作为稳定。
纪念速度VB和WB为稳定。
为了CT = 1:40%指定α角opspec(ct)。输出(3)。y=α(ct);opspec(ct)。输出(3)。已知=真;%指定β角opspec(CT).Outputs(4).Y =β(CT);opspec(CT).Outputs(4).Known = TRUE;%指定马赫速度opspec(ct)。输出(5)。y=马赫;opspec(ct)。输出(5)。已知=真;%将p、q、r标记为稳定opspec(ct).状态(2).稳定状态=真(3,1);% Mark vb,wb稳定opspec(CT).States(3).SteadyState = [假真;真];%(PHI,θ,PSI)和(XE,叶,泽)不是稳定opspec(ct).状态(1).稳定状态=假(3,1);opspec(ct).状态(4).稳定状态=假(3,1);结尾
为了充分描述配平条件,还需要
设置p=0以防止滚动。
将横摇/俯仰/偏航角度(φ、θ、psi)设置为(0、α、β),以对齐风和地球框架。
将机身位置(Xe、Ye、Ze)指定为(0,0,-高度)。
为了CT = 1:40%将(φ,θ,psi)设置为(0,α,β)opspec(ct).States(1).x=[0;α(ct)*d2r;β(ct)*d2r];opspec(ct).状态(1).已知=真(3,1);%集P = 0(无轧制)opspec(CT).States(2).X(1)= 0;opspec(CT).States(2).Known(1)=真;%设定(XE,叶,泽)到(0,0,-Altitude)opspec(CT).States(4).X = [0;0;-高度];opspec(CT).States(4).Known =真(3,1);结尾
现在使用芬多普一次性计算所有40个(α,β)组合的修剪条件。此批处理模式方法涉及模型的单个编译。FINDOP使用优化来解决表征每个平衡的非线性方程。此处我们使用“SQP”算法完成此任务。
%设置FINDOP解算器的选项TrimOptions=findopOptions;TrimOptions.OptimizationOptions.Algorithm=“sqp”; TrimOptions.DisplayReport=“关”;%修剪模型[ops,rps]=findop('csthl20_trim'、opspec、TRIMPOPTIONS);
这将返回8×5阵列OPS(操作条件)和RPS(优化报告)。可以使用RPS验证是否已成功计算每个修剪条件。第一对(α,β)的结果如下所示。
[α(1)β(1)]
ANS = -10 -10
行动(1)
csthl20_trim模型的工作点。(时变组件评估在时间t = 0) : ---------- ( 1) csthl20_trim / HL20机身/ 6自由度(欧拉角)/计算DCM和欧拉角/θψφx: 0 x: -0.175 x: -0.175 (2) csthl20_trim / HL20机身/ 6自由度(欧拉角)/ p, q, r x: 0 x: -0.158 x: 0.008 (3) csthl20_trim / HL20机身/ 6自由度(欧拉角)/乌兰巴托,vb,世行x: 191 x: -34.2 x:-33.7 (4.) csthl20_trim/HL20 Airframe/6DOF (Euler angle)/xe,ye,ze x: 0 x: 0 x: -3.05e+03输入:---------- (1.)csthl20_trim/da u: -24 (2.) csthl20_trim/de u: -6.49 (3.) csthl20_trim/dr u: 4.09
rps(1).终止字符串
ans='已成功满足操作点规范。'
批量线性化
飞行控制系统的增益通常被安排为α和β的函数,见第2部分(角速率控制在HL-20自动驾驶仪) 更多细节。要调整这些收益,你需要在40个修剪条件线性化HL-20机身的机型。用线性化计算这些车型从装饰工作条件OPS.
%在每个配平条件下线性化机身动力学G=线性化('csthl20_trim'那“csthl20_配平/HL20机身”尺寸(克)
8X5阵列状态空间模型。每个模型具有34个输出,9个输入,和12个状态。
“控制选择器”块的线性等效值取决于升降舵偏转量,应针对qbar_inv=1(马赫数=0.6时的标称动态压力)进行计算。为方便起见,还应在40配平条件下对该块进行线性化。
CS=线性化('csthl20_trim'那“csthl20_trim /控制选择”,ops);%零点出A / B和qbar_inv通道CS=[CS(:,1:3)零(6,2)];
线性模型简化
线性化机身模型有12种状态:
xG=G.StateName
xG=12x1单元阵列{'phi theta psi(1)}{'phi theta psi(2)}{'phi theta psi(3)}{'p,q,r(1)}{'p,q,r(2)}{'p,q,r(3)}{'ub,vb,wb(1)}{'ub vb wb(2)}{'ub vb,vb,wb(3)}{'
有些国家不是滚动/俯仰/偏航自动驾驶仪和其他国家的授权下一点一点为这个自动驾驶仪的设计做出贡献。出于控制的目的,最重要的状态是侧倾角披,身体速度UB,VB,WB,和角速率P,Q,R。因此,使用莫德雷德获得7阶模式,只保留这些状态。
G7=G;xKeep={......'披THETA PSI(1)'‘ub、vb、wb(1)’‘ub、vb、wb(2)’'UB,VB,WB(3)''P,Q,R(1)''P,Q,R(2)''P,Q,R(3)'}59449;为了CT = 1:40 G7(:,:,CT)=莫德雷德(G(:,:,CT),xElim,'截短');结尾
有了这些线性化模型,您可以开始调整和调度飞行控制系统增益的任务。请参阅角速率控制在HL-20自动驾驶仪对于本例的第2部分。
相关的话题
您还可以从以下列表中选择网站: