PID调谐器分析设计
要确定PID控制器是否满足您的要求,您可以使用介绍系统响应PID调谐器响应的阴谋。
情节系统响应
为了确定补偿器的设计是否满足您的要求,您可以使用响应图分析系统响应。在PID调谐器选项卡中选择响应图添加图菜单。这添加图菜单还允许您从几个步骤图(时域响应)或波德图(频域响应)中选择。

对于PI,PIDF和PDF等1-DOF PID控制器类型,软件根据以下单环控制架构计算系统响应,其中G您的指定工厂和CPID控制器是:

对于2-DOF PID控制器类型,如PI2,PIDF2和I-PD,软件根据以下架构计算响应:

系统响应基于2-DOF PID控制器的分解,C,进入一个设定的组件CR.和反馈组件Cy,如双程度自由的PID控制器。
下表总结了分析图的可用响应。
| 响应 | 绘制系统(1-DOF) | 绘制系统(双自由度) | 描述 |
|---|---|---|---|
植物 |
G | G | 植物响应。用于检查植物动态。 |
开环 |
GC | -GCy | 开环控制器 - 工厂系统的响应。用于频域设计。 当您的设计规范包括稳健性标准时,如开环增益边距和相位余量。 |
参考跟踪 |
(从R.至y) |
(从R.至y) |
闭环系统响应设定点的步骤变化。当您的设计规格包括设定值跟踪时使用。 |
控制器努力 |
(从R.至你) |
(从R.至你) |
闭环控制器输出响应设定点的步骤变化。当您的设计受到实际限制的限制时,如控制器饱和度。 |
输入干扰抑制 |
(从D.1至y) |
(从D.1至y) |
闭环系统响应负载干扰(植物输入处的阶跃干扰)。当您的设计规格包括输入干扰抑制时使用。 |
输出干扰抑制 |
(从D.2至y) |
(从D.2至y) |
闭环系统对植物输出的阶跃干扰的响应。当您想分析对建模错误的敏感性时使用。 |
比较调谐响应以阻止响应
默认,PID调谐器使用以下两种方法绘制系统响应:
Simulink中控制器块中的PID系数值金宝app®模型(块响应)。
电流的PID系数值PID调谐器设计(调谐响应)。
当您调整当前时PID调谐器设计,例如通过移动滑块,调谐响应曲线变化,而块响应图不会。

写下当前PID调谐器设计到Simulink模型,金宝app单击![]() 。当您这样做时,当前的调优响应将成为Block响应。进一步调整当前设计将创建一个新的调优响应行。
。当您这样做时,当前的调优响应将成为Block响应。进一步调整当前设计将创建一个新的调优响应行。
要隐藏块响应,请单击![]() 选项,并取消选中显示块响应。
选项,并取消选中显示块响应。
查看系统特性的数值
您可以查看系统特性的值,如峰值响应和增益裕度,或:
直接在响应图上——使用右键菜单添加特征,这些特征显示为蓝色标记。然后,左键单击标记,显示相应的数据面板。
在性能和鲁棒性表 - 要显示此表,请单击
 显示参数。
显示参数。

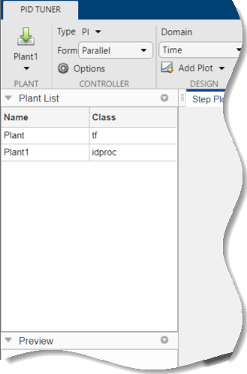
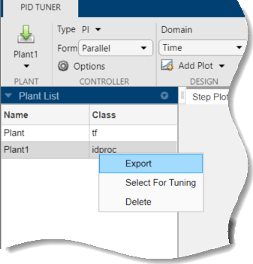
出口工厂或控制器马铃薯工作空间
您可以导出由此计算的线性化工厂模型PID调谐器MATLAB的®工作区进行进一步分析。为此,请单击更新块并选择出口。

在“导出”对话框中,检查要导出的模型。点击好吧将工厂或控制器导出到MATLAB工作区作为状态空间(SS.)模型对象或pid对象分别。
控件中的上下文菜单也可以导出模型数据浏览器。为此,请单击数据浏览器标签。
然后,右键单击模型并选择出口。
优化设计
如果初始控制器设计的响应不符合您的要求,则可以交互方式调整设计。PID调谐器给你两个领域精制控制器设计的选项:
时间域(默认) - 使用响应时间滑块使控制系统的闭环响应变快或变慢。使用暂时行为滑块使控制器在干扰拒绝或更强大的植物不确定性方面更具侵略性。频率——使用带宽滑块使控制系统的闭环响应加快或减慢(响应时间为2/W.C, 在哪里W.C是带宽)。使用阶段边缘滑块使控制器在干扰拒绝或更强大的植物不确定性方面更具侵略性。
在这两种模式中,在参考跟踪和扰动性能之间存在权衡。有关显示如何使用滑块调整此权衡的示例,请参阅Tune PID控制器以支持参考跟踪或干扰抑制。
一旦你找到了一个满足你要求的补偿器设计,验证它在非线性Simulink模型中表现出类似的方式。金宝app说明,请参阅在Simulink模型中验证PID设计金宝app。
小费
转到初始控制器设计后移动滑块后,单击![]() 重置设计。
重置设计。
也可以看看
相关的话题
你也可以从以下列表中选择一个网站: