PID调谐器
调谐PID控制器

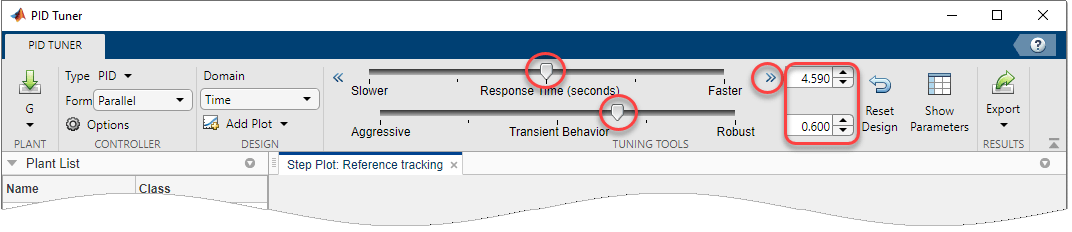
打开PID调谐器应用程序
MATLAB TOOLSTRIP:在应用标签,下面控制系统设计与分析,单击应用程序图标。
MATLAB命令提示符:输入
Pidtuner..金宝appSimulink模型:在PID控制器或PID控制器(2DOF)块对话框,单击调.
例子
相关例子
- PID调节器有利于参考跟踪或干扰抑制(PID调节器)
- Simulink中的PID控制器调整金宝app(金宝appSimulink Control Design)
- 用PID调节器设计PID控制器
- Simulink中基于模型的PID调优介绍金宝app(金宝appSimulink Control Design)
参数
植物——当前植物
数据浏览器|中的LTI模型进口|......
这植物菜单显示当前植物的名称PID调谐器用于控制器设计。
使用以下菜单选项更改当前工厂:
存在的LTI模型列表PID调谐器数据浏览器。
进口-从MATLAB工作空间导入一个新的LTI模型。Re-Linearize闭环- 在不同的快照时间线性化植物。看在不同的操作点调整(金宝appSimulink Control Design).此选项仅在调谐时可用PID控制器或PID控制器(2DOF)在Simulink模型金宝app中块。识别新工厂- 使用系统识别来从测量或模拟系统响应数据获取工厂(需要系统识别工具箱软件)。看:响应数据的交互式估计植物参数,调整LTI模型的PID控制器时。
交互式地从测量或模拟响应数据估计植物(金宝appSimulink Control Design),调整时PID控制器在Simulink模型金宝app中块。
如果你正在为一个由LTI模型表示的对象调整PID控制器,默认的对象是:
植物= 1,如果你打开PID调谐器从应用在MATLAB TOOLSTRIP中的选项卡,或者如果您使用过Pidtuner.没有输入参数的命令。指定为输入参数的植物
Pidtuner..
如果你正在调整一个PID控制器或PID控制器(2DOF)块在Simulink模金宝app型中,然后默认工厂在模型初始条件指定的操作点处线性化。看PID调谐器看到什么植物?(金宝appSimulink Control Design)
类型——控制器类型
“π”|'pidf'|'pid2'|......
控制器类型指定PID控制器中存在哪些项。例如,PI控制器有一个比例项和一个积分项。PDF控制器具有比例项和滤波导数项。
如果要为LTI模型表示的工厂调整控制器,请使用类型菜单指定控制器类型。当你改变控制器类型时,PID调谐器自动设计一个新的控制器。可用的控制器类型包括2-DOF PID控制器,以便在抗扰和参考跟踪之间取得更大的灵活性。有关可用控制器类型的详细信息请参见PID控制器类型进行调整.
如果你正在调整一个PID控制器或PID控制器(2DOF)块在Simulink模金宝app型中类型字段显示在块对话框中指定的控制器类型。
添加图- 创建分析图
参考跟踪|输入干扰抑制|控制器努力|......
创建时域和频域分析图以帮助分析PID控制器的性能。有关可用响应图的详细信息,请参阅:
PID调谐器分析设计(为LTI模型调整控制器)
PID调谐器分析设计(金宝appSimulink Control Design)(调整PID控制器或PID控制器(2DOF)Simulink模金宝app型中的块)
程序使用
提示
你也可以从以下列表中选择一个网站:
