在不同的工作点进行调谐
默认情况下,PID调谐器将设备线性化,并在Simulink中初始条件指定的工作点设计控制器金宝app®模型有时,此操作点与要为其设计控制器的操作点不同。例如,您希望为处于稳态的系统设计控制器。然而,Simulink模型在初始条件下通常不处于稳态。在这种情况下,请更改以下操作点:金宝appPID调谐器用于线性化设备和设计控制器。
设置一个新的操作点PID调谐器,使用以下方法之一。选择的方法取决于您所拥有的有关所需操作点的信息。
已知状态值产生所需的工作条件
在这种情况下,直接在模型中设置状态值。
关PID调谐器.
将模型组件的初始条件设置为产生所需操作条件的值。
点击曲调在“PID控制器”对话框中打开PID调谐器.PID调谐器使用新的默认工作点对设备进行线性化,并为新的线性设备模型设计新的初始控制器。
之后PID调谐器生成新的初始控制器设计,从继续PID调节器的设计分析.
模型在有限时间内达到所需的运行条件
在这种情况下,使用PID调谐器在特定模拟时间重新接近模型。
在PID调谐器选项卡,在植物菜单,选择重新线性化闭环.
在闭环再线性化选项卡,单击
 运行模拟在中指定的时间内模拟模型模拟时间文本框。
运行模拟在中指定的时间内模拟模型模拟时间文本框。PID调谐器绘制误差信号作为时间的函数。您可以使用此图来确定模型处于稳定状态的时间。将垂直条滑动到您想要线性化模型的快照时间。
点击
 线性化在选定的快照时间对模型进行线性化。PID调谐器计算新的线性化对象并将其保存到PID调谐器工作空间。PID调谐器自动为新设备设计控制器,并显示新闭环系统的响应图。PID调谐器还你PID调谐器tab,在哪里植物菜单反映了当前控制器设计选择的新设备。
线性化在选定的快照时间对模型进行线性化。PID调谐器计算新的线性化对象并将其保存到PID调谐器工作空间。PID调谐器自动为新设备设计控制器,并显示新闭环系统的响应图。PID调谐器还你PID调谐器tab,在哪里植物菜单反映了当前控制器设计选择的新设备。笔记
对于具有基于触发器的工作点快照块的模型,软件在模拟到达快照时间之前触发的事件中捕获工作点。
之后PID调谐器生成新的初始控制器设计,从继续PID调节器的设计分析.
您在中计算了一个工作点模型线性化器
在模型线性化器应用程序,将保存的工作点对象从线性分析工作空间拖动到MATLAB工作空间。
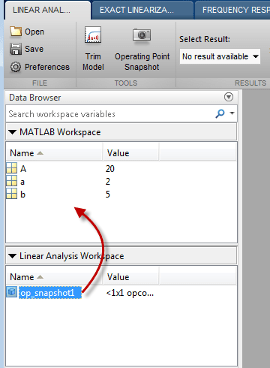
在里面PID调谐器,在PID调谐器选项卡,在植物菜单,选择进口.
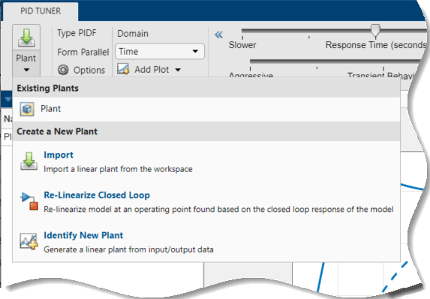
选择导入LTI系统或在MATLAB工作空间中定义的工作点处线性化. 在表中选择导出的工作点。
点击好啊.PID调谐器计算新的线性化对象并将其保存到PID调谐器工作空间。PID调谐器自动为新设备设计控制器,并显示新闭环系统的响应图。PID调谐器还你PID调谐器tab,在哪里植物菜单反映了当前控制器设计选择的新设备。


之后PID调谐器生成新的初始控制器设计,从继续PID调节器的设计分析.
相关的话题
您还可以从以下列表中选择网站: