从测量或模拟响应数据的交互性估计工厂
如果您有系统识别工具箱™软件,PID调谐器允许您根据时域响应数据估计线性工厂模型的参数。PID调谐器然后调整用于所产生的估计模型的PID控制器。响应数据可以从您的真实系统中测量,或者通过模拟您的Simulink获得金宝app®模型。当您的Simulink模型不能线性化或线性化为零时,植物估计尤其有用。金宝app对于工厂标识,您必须为Simulink模型停止时间指定有限值。金宝app
PID调谐器为您提供几种技术,以图形方式,手动或自动调整估计的模型以匹配您的响应数据。本主题说明了一些技术。
获取识别的响应数据
在PID调谐器, 在里面PID调谐器标签,在植物菜单,选择识别新工厂。
在里面植物鉴定选项卡,单击![]() 获取I / O数据。此菜单允许您以两种方式之一获取系统响应数据:
获取I / O数据。此菜单允许您以两种方式之一获取系统响应数据:
模拟数据。通过模拟Simulink模型对输入信号的响应来获得系统响应数据。金宝app有关更多信息,请参阅使用模拟I / O数据设计PID控制器。
导入I / O数据。如图所示导入测量的系统响应数据导入植物估计的测量响应数据。
导入或模拟数据后,植物鉴定绘图显示响应数据和初始估计工厂的响应。您现在可以选择工厂结构并调整估计的工厂参数,直到估计工厂的响应是良好的响应数据。
预处理数据
根据导入或模拟数据的质量和功能,您可能希望在数据上执行一些预处理以改善估计的工厂结果。PID调谐器提供预处理响应数据的多个选项,例如删除偏移,过滤或提取数据的子集。有关信息,请参阅预处理数据。
调整植物结构和参数
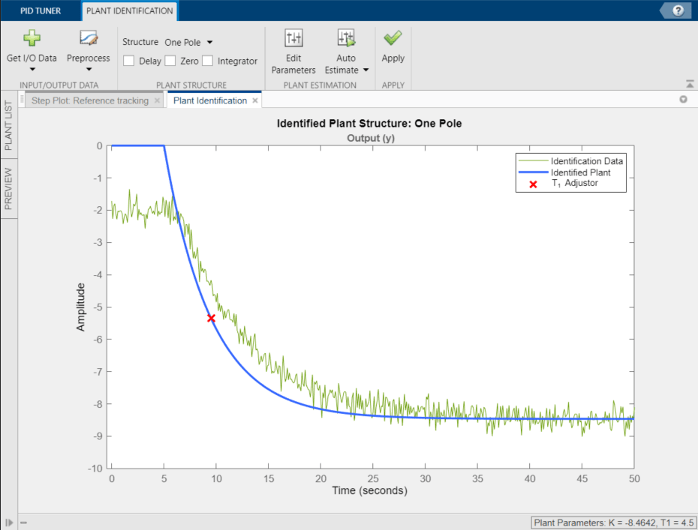
PID调谐器允许您指定工厂结构,例如一杆那两个真正的杆子, 或者状态空间模型。在里面结构菜单,选择最符合您的回复的工厂结构。您还可以向您的工厂添加传输延迟,零或集成器。
在以下样品图中,单极结构提供了定性正确的响应。您可以进一步调整工厂结构和参数值,以使估计系统响应更好地匹配测量的响应数据。
PID调谐器为您提供了几种方法来调整工厂参数:
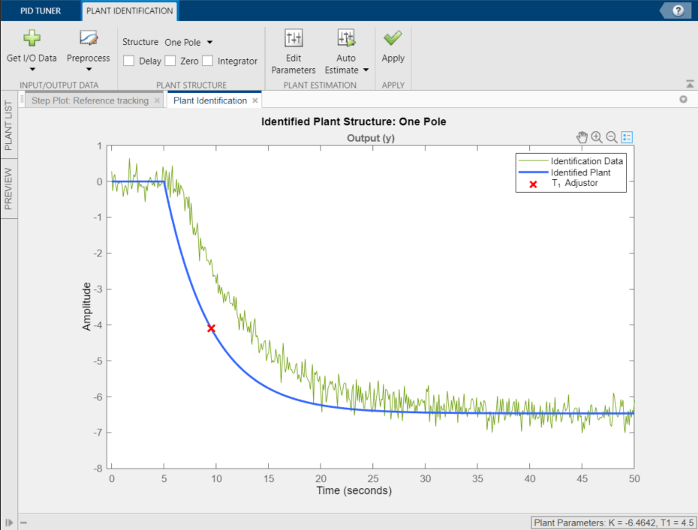
通过拖动图上的调节器来图形方式调整估计系统的响应。在此示例中,拖动红色
X调整估计的工厂时间常数。PID调谐器根据您的方式重新计算系统参数。当您更改估计的系统的响应时,它变得显而易见的是,在输入的应用程序中存在一些时间延迟T.= 5 s,以及系统到该步骤输入的响应。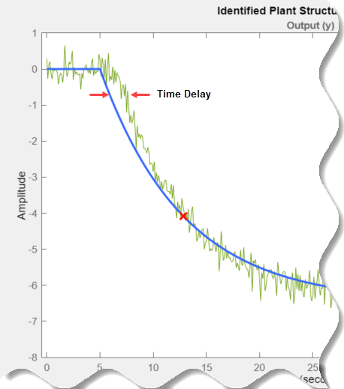
将运输延迟添加到估计的工厂模型中植物结构部分,检查延迟。绘图上显示垂直线,表示延迟的当前值。拖动向左或向右拖动以更改延迟,并通过拖动红色来对系统响应进行进一步调整
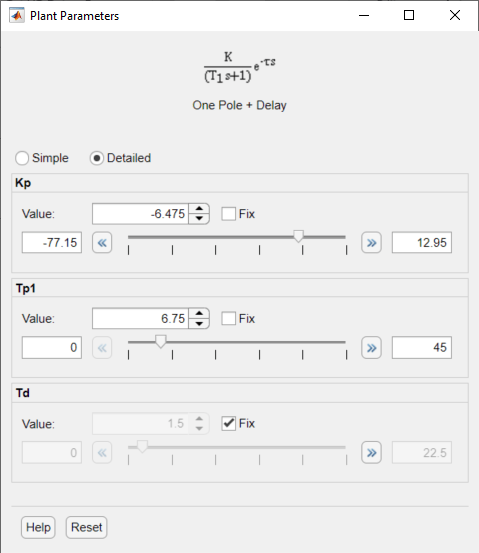
X。调整系统参数的数值,例如增益,时间常数和时间延迟。要在数字上调整系统参数的值,请单击
 编辑参数。
编辑参数。假设您从一个独立的测量中知道,系统中的传输延迟为1.5秒。在里面植物参数对话框,输入1.5 forτ.。查看使固定修复参数值。当你检查一下使固定对于参数,既不是估计的工厂模型的图形也不自动调整,影响参数值。
自动优化系统参数以匹配测量的响应数据。点击
 自动估计使用当前值更新估计的系统参数作为初始猜测。
自动估计使用当前值更新估计的系统参数作为初始猜测。


您可以继续使用这些方法中的任何一种来调整工厂结构和参数值,直到估计的系统响应充分匹配测量的响应。
保存工厂和曲调PID控制器
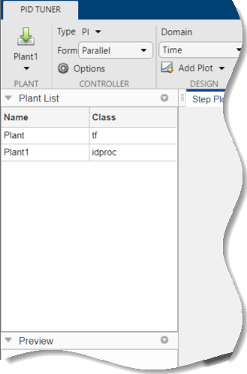
当您对拟合感到满意时,请单击![]() 拯救工厂。这样做节省了估计的植物,
拯救工厂。这样做节省了估计的植物,Plant1., 至PID调谐器工作区。这样做也选择了步骤图:参考跟踪数字并将您返回给您PID调谐器标签。PID调谐器自动设计PI控制器Plant1.,并为新的闭环系统显示响应曲线。这植物菜单反映了这一点Plant1.选择用于当前的控制器设计。
小费
检查存储在中的变量PID调谐器工作区,打开数据浏览器。
你现在可以使用PID调谐器改进估计工厂的控制器设计的工具并检查调谐系统响应。
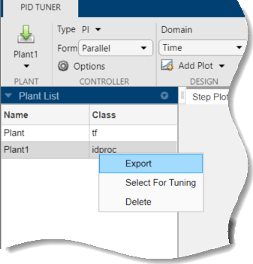
您还可以从中导出已识别的工厂PID调谐器工作区到MATLAB®工作区进行进一步分析。在里面PID调谐器选项卡,单击![]() 出口。检查要导出到MATLAB工作区的工厂模型。对于此示例,导出
出口。检查要导出到MATLAB工作区的工厂模型。对于此示例,导出Plant1.,您从响应数据中识别的植物。您还可以导出调谐的PID控制器。点击![]() 好的。您选择的模型保存到MATLAB工作区。
好的。您选择的模型保存到MATLAB工作区。
已识别的工厂模型保存为已识别的LTI模型,例如IDProc.(系统识别工具箱)或者IDS.(系统识别工具箱)。
小费
或者,右键单击工厂数据浏览器选择它以将其调整或导出到MATLAB工作区。
相关话题
您还可以从以下列表中选择一个网站: