利用闭环PID自动调谐块实时调节PID控制器
这个例子说明了如何使用闭环PID自动调节器块调整PID控制器,用于仿真和实时升压转换器厂。
电压型控制升压变换器的介绍
在本例中,电压模式升压转换器在Simulink®中使用Simscape™Electrical™组件建模。金宝app这些组件的参数都是基于[1]的。
mdl ='scdboostconverterPIDTuning';open_system(MDL)

升压转换器电路通过控制切断或切换源电压,将直流电压转换成另一种更高的直流电压。在这个模型中,一个由脉宽调制(PWM)信号驱动的MOSFET被用于开关。数字PID控制器调整PWM占空比以保持负载电压VOUT在其参考Vref。
在额定工作点,负载电压为18伏,占空比约为0.74。在升压变换器运行期间,占空比可从0.1到0.85不等。
现有的PID控制器具有P = 0.02的增益,I = 160,d = 0.00005且N = 20000它们存储在数据存储存储器块和外部给PID块提供。有外部增益inports允许你改变他们以后新的收益是由闭环PID自动调节器块计算。
闭环PID自动调节器模块的介绍
闭环PID自动调节器模块可以让你收听仿真和实时单回路PID控制器。它注入正弦扰动信号在工厂输入并测量闭环实验期间电站输出。当实验停止时,块计算基于近期望带宽推定的植物频率响应PID增益。
闭环PID自动调节器模块支持实时应用的两个典型的PID自整定方案:金宝app
(1)将block部署到硬件上,并在不使用Simulink的情况下,将其用于独立的实时应用程序中。金宝app
(2)在硬件上部署block,但在Simulink中使用外部仿真模式实时监控和管理Simulink的调优过程。金宝app外部模式允许在主机上运行的Simulink框图和在硬件上运行的生成代码之间进行通信。金宝app
本例主要关注第一个场景,部署块来执行实时调优。
金宝appSimulink Control Design™还提供了一个用于实时PID调优的开环PID自动调谐块。两个自动调谐器块之间的主要区别是开环PID自动调谐器块在反馈回路打开的情况下进行实验(即现有控制器不工作)。要决定哪一个autotuner块最适合您的应用程序,请考虑:
如果没有初始控制器,可以使用开环PID自动调谐器块来获得初始控制器。您可以继续使用它来重新调整控制器或将其替换为闭环PID自动调谐器。
如果您有一个初始控制器,请使用闭环PID自动调谐块进行重新调整。主要的好处是:(1)如果在实验过程中出现了意外的干扰,现有的控制器会拒绝它,以确保安全运行;(2)现有的控制器通过抑制扰动信号,使装置在其标称工作点附近运行。
将自动调谐块与设备和控制器连接
在PID块和工厂之间插入闭环PID自动调谐块,如图boost转换器模型所示。启动/停止信号启动和停止闭环实验。当无实验运行时,闭环PID自动调谐块表现为单位增益块,其中u信号直接传递到u +Δu。
在仿真和实时应用中使用闭环PID自动调谐块时,需要注意以下几点:
该工厂必须是渐进稳定的(即所有极严格稳定)或整合。该自动调谐块不与不稳定的工厂工作。
现有控制器的反馈回路必须是稳定的。
为了更准确地实时估计植物频率响应,最小化在植物的任何负载干扰的实验过程中发生。所述自动调谐器块预计植物输出是仅注入扰动信号的响应,和负载扰动扭曲此输出。
由于反馈回路在实验过程中是闭合的,现有的控制器也抑制了注入的扰动信号。采用闭环实验的优点是控制器使装置运行在标称工作点附近,保证了装置的安全运行。缺点是当目标带宽距离当前带宽较远时,会降低频响估计的精度。
配置自动调谐块
正确闭环PID自动调节器块与植物模型和PID块连接后,使用块参数指定的调整和实验设置。
还有在调优选项卡两个主要调整设置:
目标带宽:决定你如何快速让控制器回应。在这个例子中,选择
10000rad/sec,这是典型的升压转换器。
目标阶段裕度:决定您希望控制器有多健壮。在本例中,选择的默认值为
60度。

有在实验标签三个主要实验的设置:
植物类型:指定植物是渐近稳定的还是可积分的。在此实例中,升压变流器装置是稳定的。
植物符号:指定植物的正负号。当工厂达到一个新的稳定状态时,如果工厂在名义工作点的输入发生正的变化,导致工厂的输出也发生正的变化,则工厂符号为正。否则,植物符号为负。如果一个植物是稳定的,植物符号等于它的直流增益的符号。如果一个工厂在积分,如果工厂产量持续增加(或减少),工厂符号就是正的(或负的)。在本实例中,升压变流器厂具有正厂标志。
正弦振幅:注入正弦波的指定振幅。在这个例子中,选择
0.03对于所有的干扰信号,以确保工厂的五个频率饱和极限内适当激励。如果激励幅度过大,升压转换器将在非连续电流模式操作。如果输入振幅过小,该正弦信号将是从功率电子电路的波纹难以区分。这两种情况下产生不准确的频率响应的估计结果。

在正常模式模拟自动调节器模块
如果您在Simulink中构建了一个工厂模型,建议在部署它进行实时调优金宝app之前,将闭环PID自动调谐器块与工厂模型在正常模式下进行模拟。模拟将帮助您识别信号连接和块设置中的问题,以便您可以在生成代码之前调整它们。
由于PWM发生器的采样时间非常快,所以在计算机上对升压变流器进行模拟通常需要几分钟。VOUT工厂的产量是多少占空比是所述植物的输入。
sim (mdl)
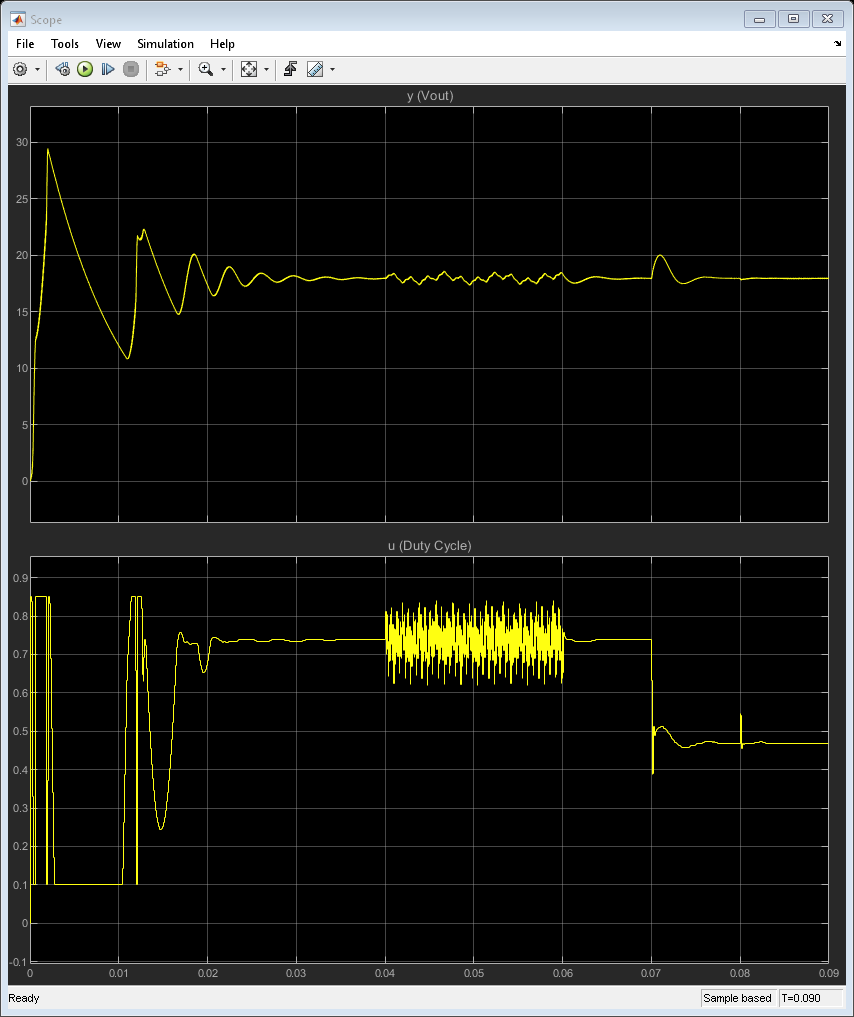
在这个例子中,大约需要PID控制器0.04秒将升压转换器带至额定工作点。初始暂态过程中存在较强的振荡现象,说明现有的控制器需要重新调整。
在0.04几秒钟后,自动调优过程开始。实验持续0.02因为在线频响估计收敛通常需要“200/带宽”秒。
当PID调优停止时0.06秒,块计算新的增益,P = 0.04,I = 100,d = 0.00006且N = 30000新增益被立即写入到数据存储存储器和发送到PID块的外部增益inports,覆盖原来收益。
该模型具有线干扰(VIN从5V至10V)和负载电流扰动(负载从图6A到图3A)。他们分别第二次出现0.07秒和0.08,你可以用它们来检查控制器的性能。新的一组的PID增益提供少得多的振荡的改进的闭环响应。
在独立应用程序中使用自动调节器模块
要在独立实时应用程序中根据物理boost转换器对PID控制器进行调优,需要从闭环PID自动调优器块生成C/ c++代码,并将其部署到硬件上。
以下是可在运行时更改的可调参数列表:
PID类型
PID表
PID积分与滤波方法(仅限离散时间)
目标带宽
目标阶段保证金
株型
工厂签字
正弦波振幅
闭环PID自动调节器模块的采样时间是不可调的参数。要使用不同的样本时间内的自动调谐器模块无需重新编译,在块对话框设置控制器采样时间1并将调谐器块放入已触发的子系统中。调谐器块现在与触发信号要求的采样时间相同。
参考文献
李[1],s.w.。电压型升压变换器的实用反馈回路分析。Application Report No. SLVA057. Texas Instruments. January 2014. www.ti.com/lit/an/slva633/slva633.pdf
bdclose(MDL)