永磁同步电机的磁场定向控制
这个例子展示了如何建模控制器,并在Xilinx®Zynq™-7000全可编程SoC目标上实现它。这个例子使用了ZedBoard和Analog Devices®电机控制FMC板。如果您没有所需的硬件,您可以使用这个示例来帮助您为自己的硬件配置开发一个控制器。
介绍
这个例子为永磁同步电机(PMSM)建模了一个磁场定向控制器(FOC),但是你可以应用这个例子中显示的技术来开发大多数控制器算法。该图像显示了从模型仿真到在嵌入式硬件板上部署控制器算法的通用工作流。
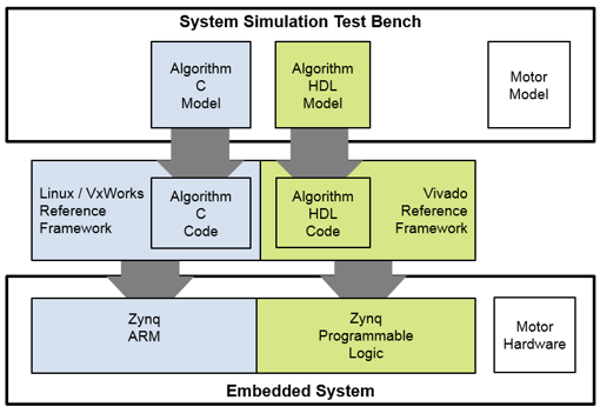
模拟系统测试台,以深入了解控制器算法设计的行为。然后探索设计,看看算法是如何划分的。算法的高速率部分被划分为一个模型,该模型被配置为生成HDL代码。算法的低速率部分被划分成一个模型,该模型被配置为生成C代码。从这些模型生成C和HDL代码,并了解如何将这些代码集成到设计中。
在研究了算法C和HDL代码之后,将算法代码自动部署到处理器和可编程逻辑的参考框架中。然后,在部署的应用程序上执行测试,记录结果,并将它们与模拟结果进行比较。
由于本示例将位流和ARM可执行文件部署到Xilinx Zynq,因此在开始本示例之前必须设置Xilinx Zynq硬件板。要确保正确设置环境,请完成瞄准Xilinx Zynq平台(高密度脂蛋白编码器)在开始此示例之前,请使用您的硬件配置示例。
需求
有关硬件的更多信息,请参见Zynq全可编程SoC/模拟设备智能驱动器套件.
模拟算法的行为
本节介绍如何打开示例项目、检查控制器模型以及通过模拟验证控制器行为。此示例打包为一个项目。有关Simulink项目的详细信息,请参见金宝app什么是项目?(金宝app模型)
1.运行zynqexPMSMFOCStart函数在默认的MATLAB项目文件夹中创建并打开本例项目文件的工作副本。要选择特定的文件夹,请使用文件夹的绝对路径作为输入。文件夹的绝对路径不能超过80个字符。
zynqexPMSMFOCStart (“C:\Temp”);
2.选择快捷方式管理查看此示例使用的快捷方式。

3.右键单击快捷方式并识别打开和运行快捷方式上下文菜单项。
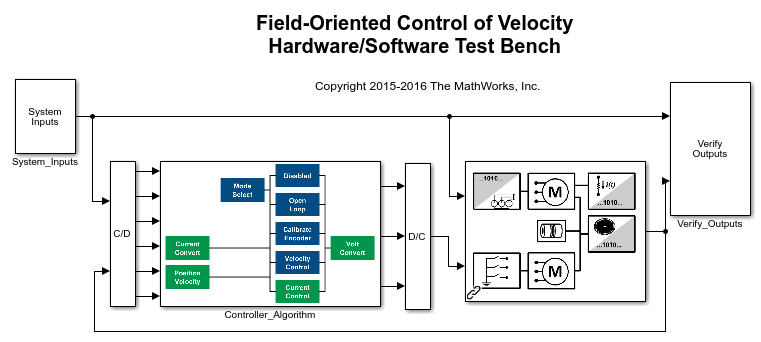
4.运行task.t1_openSimulationTestBenchModel快捷方式打开focZynqTestBench模型
task.t1_openSimulationTestBenchModel
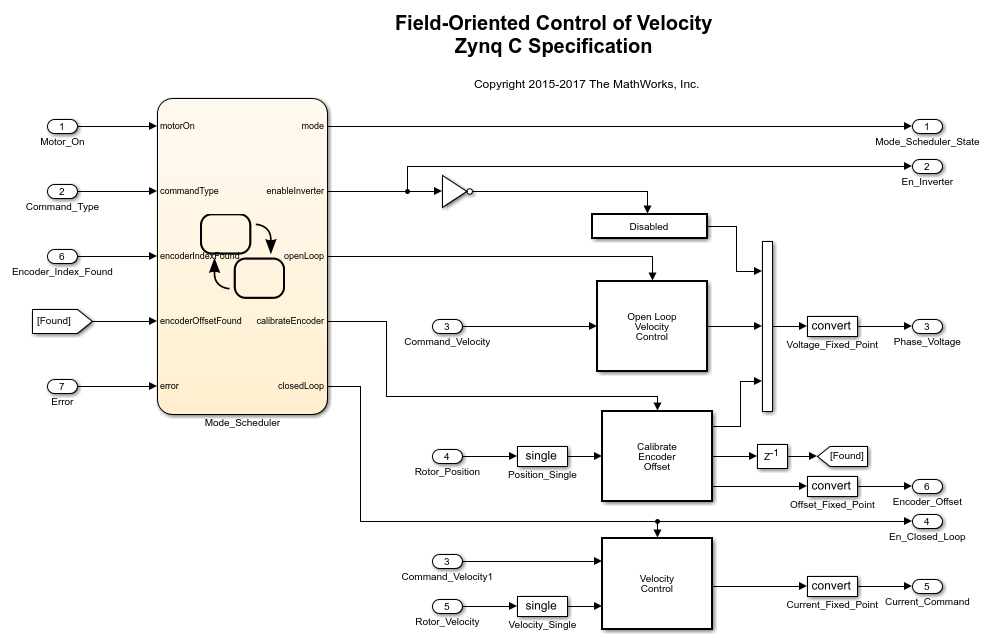
Motor_And_Load子系统由表面PMSM的数学模型、电机负载、编码器和电流传感器组成。Controller_Algorithm子系统包括I/O工程单元转换、电气位置计算、转子速度计算、模式调度程序和四种控制模式(禁用、开环速度控制、编码器校准和闭环速度控制)。这个C / D和D / C子系统将数据从连续时间,变量时间步长求解器和浮点数据类型转换为离散时间,固定时间步长求解器和定点数据类型,仿真。
如果未安装SimPowerSystems,则Motor_和_Load子系统包含一个块,使您能够使用默认的Motor和Load参数模拟模型。在这种情况下,您将无法探索或修改参数。
5.上模拟选项卡,单击金宝app跑模拟模型。
6.模型运行完毕后,打开仿真数据检查.在模拟选项卡,单击数据检查. 有关模拟数据检查器的详细信息,请参见.
7.在仿真数据检查,选择< commandType >,

在前两秒钟,控制器被命令校准编码器位置传感器。在控制器实现闭环控制之前,必须校准编码器位置传感器。在位置校准的第一部分,电机使用开环控制进行加速,以识别编码器的索引脉冲。一旦找到索引,控制器命令并保持零位置,直到识别编码器偏移。在此期间,速度为零。两秒钟后,控制器变为闭环控制,并遵循指令的速度曲线。在闭环速度控制期间,FOC调节永磁同步电机中的相电流。
分区算法与生成代码
本节介绍如何将控制器算法划分为互补的软件和硬件实现,并分别为软件和硬件实现生成C和HDL代码。检查在代码生成过程中创建的报告将展示如何将此代码集成到自己的嵌入式设计中。
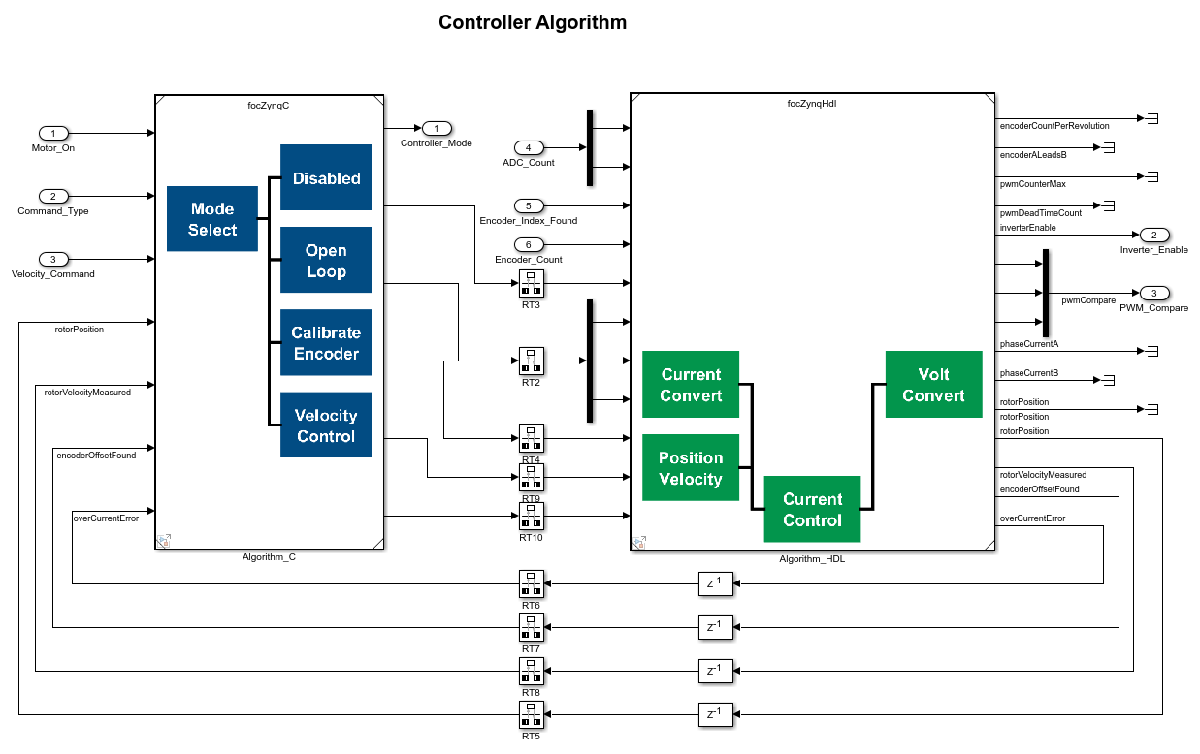
1.在focZynqTestBench模型,打开控制器\算法子系统。控制器算法包含算法C和算法HDL块,它们引用focZynqC和focZynqHDL模型,分别。这个focZynqC模型包含要在软件中实现的算法部分。同样地focZynqHDL模型包含要在硬件上实现的算法部分。
2.运行的任务。t2_generateCCode函数打开focZynqC模型,生成C代码,并生成报告。
task.t2_generateCCode
这个focZynqC模型包含模式调度程序,速度控制回路,开环速度控制器,和自动校准编码器偏移的例行程序。
3.代码生成报告显示生成的代码如何与模型相对应。如果您不熟悉代码生成报告,可以从代码接口报告查看代码的功能界面。C代码是可移植的,可以与任何使用ANSI-C编译器的浮点嵌入式处理器集成。有关代码生成报告的更多信息,请参见用于代码生成的报告.

4.运行的任务。t3_generateHdlCode函数来打开focZynqHdl模型,生成HDL代码,并生成报告。
task.t3_generateHdlCode
这个focZynqHdl该模型包括电气位置计算、转子速度计算、过电流检查和磁场定向控制器。

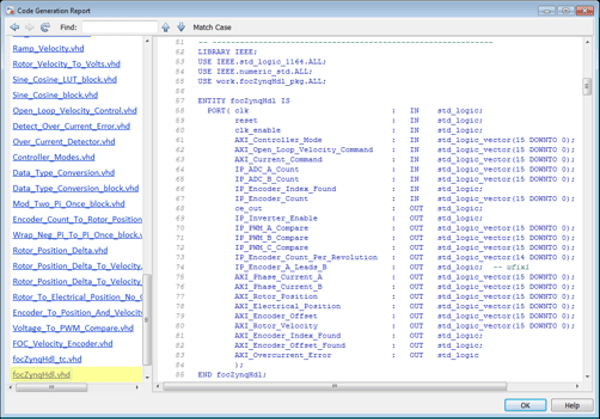
5.代码生成报告显示了HDL代码如何与模型相对应。如果您是代码生成报告的新手,您可以从探索生成的源文件窗格,并选择focZynqHdl.vhd包含实体规范的文件。该算法的HDL代码是可移植的,可以与任何支持VHDL代码的FPGA集成。金宝app
搭建Xilinx Zynq平台和电机板
本节介绍安装和连接硬件单板的方法。
1.运行硬件Setup for the Xilinx Zynq platform. For information on the hardware setup, see安装Xilinx金宝app Zynq平台支持.
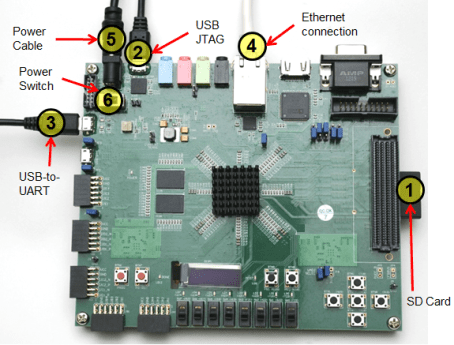
2.如图所示连接ZedBoard。
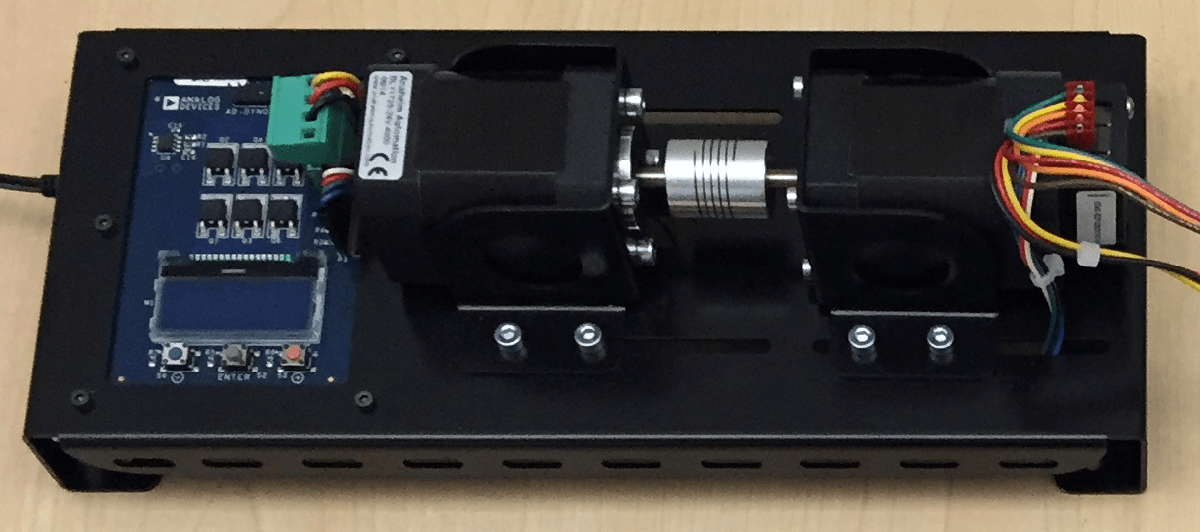
3.如图所示,连接AD-FMCMOTCON2-EBZ控制器板和ZedBoard。

将位流部署到可编程逻辑
本节向您展示如何使用HDL Workflow Advisor为算法生成HDL代码,将HDL打包到IP核中,将IP核集成到Xilinx参考设计中,并创建位流。
1.运行task.t4_openHdlWorkflowAdvisorfunction to open HDL Workflow Advisor.
task.t4_openHdlWorkflowAdvisor
2.在HDL工作流顾问>1.1设置目标设备和合成工具小组目标平台被设置为ZedBoard和FMCMOTCON2.ZedBoard和FMCMOTCON2是一个Vivado参考设计,包含ADC,编码器和PWM组件。有关如何创建此参考设计的信息,请参见为Zynq工作流定义自定义板和参考设计(高密度脂蛋白编码器).

3.选择1.2. 设置目标接口识别端口。这个目标平台的接口前缀IP指的是在ZedBoard电机控制参考设计中注册的连接。

4.选择4.3构建FPGA Bitstream >运行到Selected Task或者运行任务。t5_generateBitstreamAndInterfaceBlock函数从项目中生成算法的HDL代码,并从Xilinx参考设计创建FPGA位流。
task.t5_generateBitstreamAndInterfaceBlock

5.在打开的新DOS命令提示符上跟踪位流生成的进展。除了生成位流外,自定义目标还生成focZynqHdlAxiInterfaceLib软件界面库。该库包含一个AXI_Interface块。的AXI_Interface块包含AXI4 Lite接口组件,提供从部署在ARM处理器上的模型到部署在可编程逻辑上的模型的连接。

6.运行的任务4.4程序目标设备或者从项目中运行task.t6_downloadBitstream函数对FPGA进行编程。
task.t6_下载比特流
部署可执行文件到ARM处理器
本节介绍如何为控制器生成C代码,并自动将此代码与Linux参考框架集成,以构建、部署和运行模型,作为ARM处理器的可执行文件。从处理器上运行的模型中记录的数据可以与模拟结果进行比较。
1.运行task.t7_openZynqArmModelfunction to open theFoczynqarm部署模型
task.t7_openZynqArmModel
这个Foczynqarm部署模型可以生成C代码,自动与Linux ARM参考框架集成,并将可执行文件部署到Xilinx Zynq平台的ARM处理器上。部署模型引用原始控制器模型,并包含测试刺激、范围和在将位流部署到可编程逻辑部分。

2.在硬件选项卡,单击监视和调谐在ARM处理器上作为可执行文件构建、部署和运行模型。生成的代码根据引用框架进行编译,以创建可执行文件。在执行过程中,Simulink监控金宝app信号,在scope中显示它们。
3.打开仿真数据检查查看记录的信号并将它们与以前记录的信号进行比较focZynqTestBench模型上模拟选项卡,单击数据检查.
4.在仿真数据检查,选择rotorVelocity信号。在编码器校准模式下,由于模拟和真实的电机在不同的转子位置启动,信号最初不同,然后一致。相比之下,闭环速度控制在仿真和硬件上非常相似。差异的产生是因为电机和传感器的仿真模型使用数据表值,而没有明确地考虑物理电机的制造公差。

其他可以尝试的事情
继续研究本例中的文件,以更深入地了解模拟、代码生成和自动化部署如何帮助您为硬件开发控制器。
HDL编码器支持浮点金宝app单精度数据类型。打开示例的浮点模型:
zynqexPMSMFOCSingleStart
浮点模型强调了HDL Coder从包含定点和浮点数据类型混合的模型生成HDL代码的能力。按照相同的任务,在Xilinx Zynq SoC平台上实现单精度电流控制算法。
你也可以从以下列表中选择一个网站: