基于功能的全景图像拼接
这个例子展示了如何使用基于特征的图像配准技术自动创建一个全景图。
概述
特征检测和匹配是许多计算机视觉应用中使用的强大技术,例如图像配准,跟踪和对象检测。在该示例中,基于特征的技术用于自动缝合一组图像。图像拼接的过程是基于特征的图像配准的扩展。代替注册一对图像,多个图像对相对于彼此连续地登记以形成全景。
第1步 - 装载图像
此示例中使用的图像集包含建筑物的图片。通过沿着地平线从左到右扫描相机,捕获建筑物的所有部位,用未凝砖的智能手机摄像头拍摄。
如下所示,图像相对不受任何镜头扭曲的影响,所以相机校准是不需要的。然而,如果镜头扭曲是存在的,相机应该校准和图像不扭曲之前创建全景。你可以使用相机校准器如果需要校准相机的应用程序。
%加载图像。buildingDir = fullfile (toolboxdir (“愿景”),“visiondata”,“建筑”);buildingScene = imageDatastore (buildingDir);%显示图像要缝合蒙太奇(Buildingscene.Files)

步骤2 -注册图像对
要创建全景图,首先使用以下步骤注册连续的图像对:
检测和匹配特征之间 和 .
估计几何变换, ,地图 来 .
计算映射的变换 将全景图像转换为 .
%从图像集中读取第一图像。I = readimage(buildingScene, 1);%初始化i(1)的功能grayImage = rgb2gray(我);点= detectSURFFeatures (grayImage);[features, points] = extractFeatures(grayImage, points);%将所有转换初始化为身份矩阵。请注意%投影变换在这里使用,因为建筑图像是相当靠近相机。如果从更远的地方捕捉到这个场景,一个仿射变换就足够了。numImages =元素个数(buildingScene.Files);tforms (numImages) = projective2d(眼(3));%初始化变量以保持图像大小。图象尺寸= 0 (numImages, 2);%遍历剩余的图像对为n = 2: numImages%存储点和特性I(n-1)。pointsPrevious =点;featuresPrevious =功能;%读我(n)。I = readimage(buildingScene, n);%将图像转换为灰度。grayImage = rgb2gray(我);%保存图像大小。图像中的(n,:) =大小(灰度);%对I(n)进行SURF特征检测和提取。点= detectSURFFeatures (grayImage);[features, points] = extractFeatures(grayImage, points);%找出I(n)和I(n-1)之间的对应关系。indexPairs = matchFeatures(features, featuresPrevious,'独特',真正的);matchedPoints = points(indexPairs(:,1),:);matchedPointsPrev = pointsPrevious(indexPairs(:,2),:);%估计I(n)和i(n-1)之间的转换。tforms(n)= estimategeometrictransform2d(匹配点,matchedpointsprev,...“射影”,'置信度', 99.9,“MaxNumTrials”,2000);%计算T(n) * T(n-1) *…* T (1)tforms(n).t = tforms(n).t * tforms(n-1).t;结束
在这一点,所有的变换扭曲与第一图像相对。这是编写图像登记过程的便捷方式,因为它允许顺序处理所有图像。然而,在全景的开始时,使用第一张图像不会产生最美观的全景,因为它倾向于扭曲形成全景的大部分图像。可以通过修改变换来创建更好的全景,使得场景的中心是最不扭曲的。这是通过反转中心图像的变换并将其应用于所有其他变换来实现的。
首先使用projective2d.输出方法查找每个转换的输出限制。然后使用输出限制自动找到大致位于场景中心的图像。
%计算每个变换的输出限制为i = 1:元素个数(tforms) [xlim(我,:),ylim(我,:)]= outputLimits (tforms(我),(1)图象尺寸(我,2)]、[1图象尺寸(我,1)));结束
接下来,计算每个变换的平均X极限,并找到中间的图像。这里只使用X限制,因为场景已知是水平的。如果使用另一组图像,则可能需要同时使用X和Y限制来找到中心图像。
avgxlim =平均值(xlim,2);[〜,IDX] =排序(avgxlim);CenterIDX =地板((Numel(Tforms)+1)/ 2);CenterimageIdx = IDX(CenterIDX);
最后,将中心图像的逆变换应用于所有其他。
tinv =反转(tforms(centerimageidx));为I = 1:numel(tforms) tforms(I)。T = tforms(我)。T * Tinv.T;结束
第3步 - 初始化全景
现在,创建一个初始,空,全景,所有图像都被映射到其中。
使用输出在所有转换上计算最小值和最大输出限制的方法。这些值用于自动计算全景的大小。
为i = 1:元素个数(tforms) [xlim(我,:),ylim(我,:)]= outputLimits (tforms(我),(1)图象尺寸(我,2)]、[1图象尺寸(我,1)));结束maxImageSize = max(图象尺寸);%查找最小和最大输出限制xmin = min([1; xlim(:)]);xmax = max([maximagesize(2); xlim(:)]);ymin = min([1; ylim(:)]);ymax = max([maximagesize(1); ylim(:)]);全景图的宽度和高度。width = round(xMax - xMin);height = round(yMax - yMin);%初始化“空的”全景图。Panorama = Zeros([高度宽度3],“喜欢”, 一世);
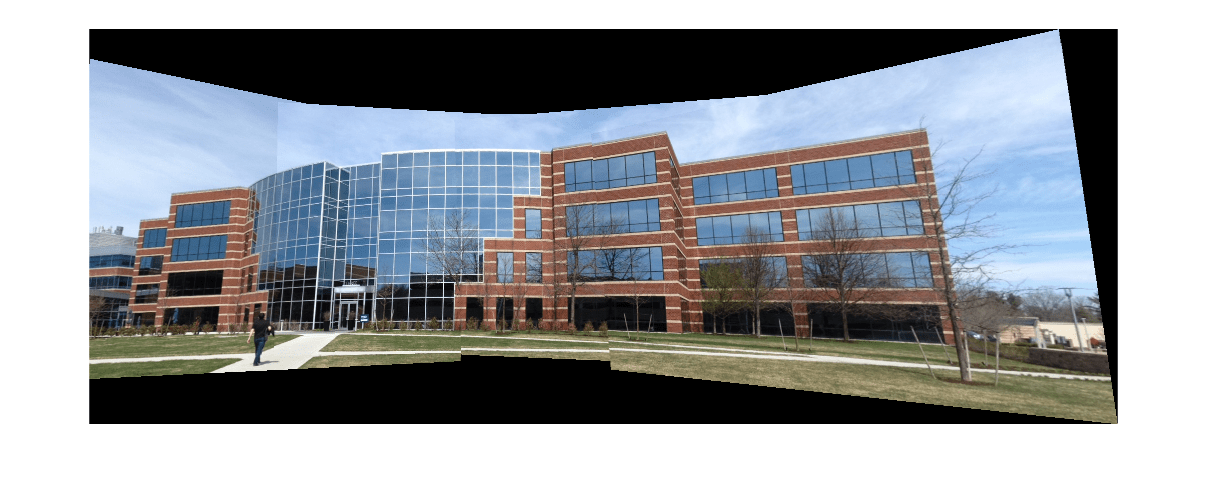
步骤4 -创建全景图
用imwarp将图像映射到全景图中并使用Vision.Alphablender.将图像叠加在一起。
Blender = Vision.Alphablender(“操作”,'二进制面具',...“MaskSource”,输入端口的);%创建一个二维空间参考对象,定义全景图的大小。xlimit = [xMin xMax];ylimit = [yMin yMax];全景视图= imref2d([height width], xLimits, yLimits);创建全景图。为i = 1:numImages i = readimage(buildscene, i);%变换I到全景图。= imwarp(I, tforms(I)),'OutputView',panoramaview);%生成二进制掩码。mask = imwarp(true(size(I,1),size(I,2)), tforms(I),'OutputView',panoramaview);%将Warpedimage覆盖到全景上。Panorama =步骤(搅拌机,全景,Warpedimage,面具);结束图imshow(全景)
结论
此示例显示了如何使用基于特征的图像登记技术自动创建全景。可以将额外的技术结合到示例中以改善全景图像的混合和对准[1]。
参考
[1]马修棕色和大卫G. Lowe。2007.使用不变功能的自动全景图像拼接。int。J. COPPLE。Vision 74,11(2007年8月),59-73。
您还可以从以下列表中选择一个网站:
