主要内容
特征检测和提取
图像配准,兴趣点检测,特征描述符提取,点特征匹配和图像检索
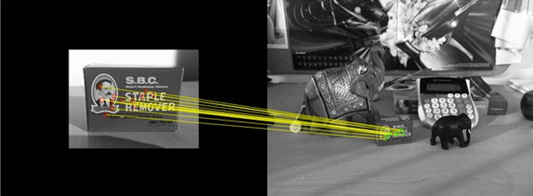
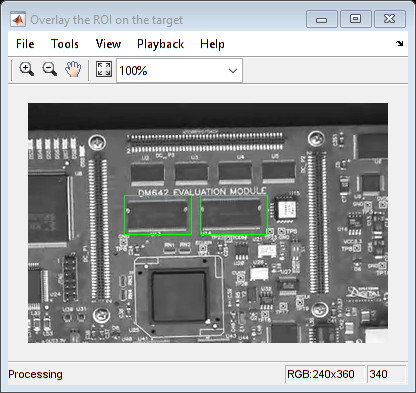
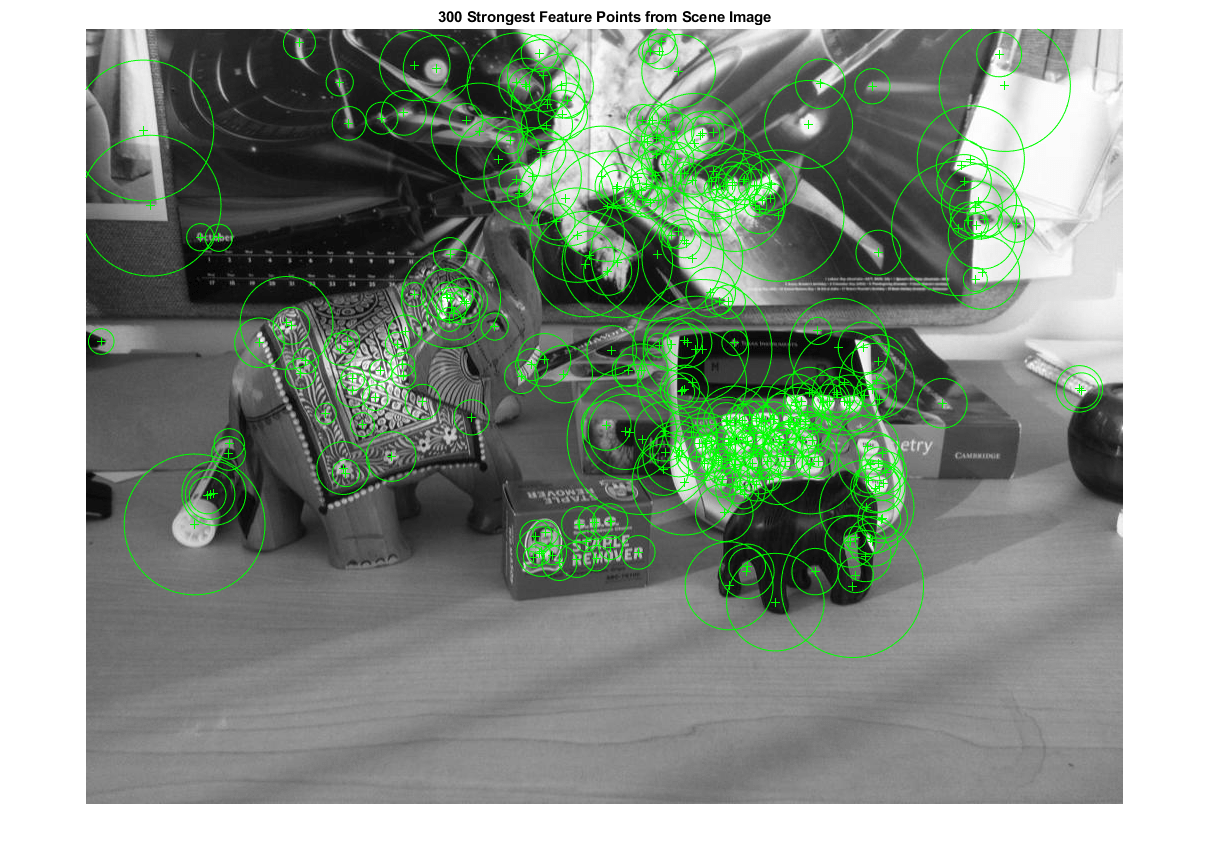
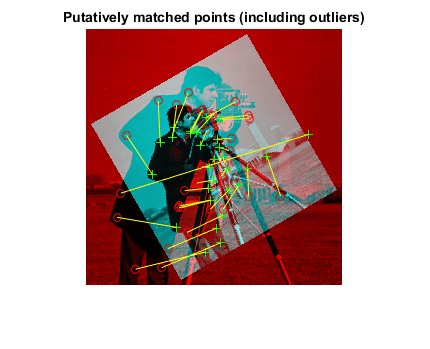
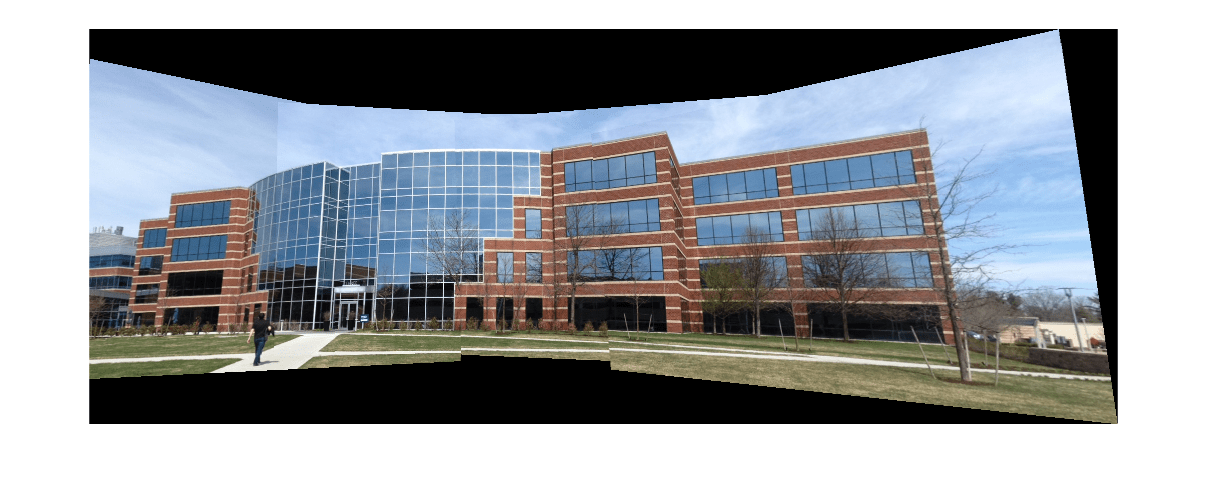
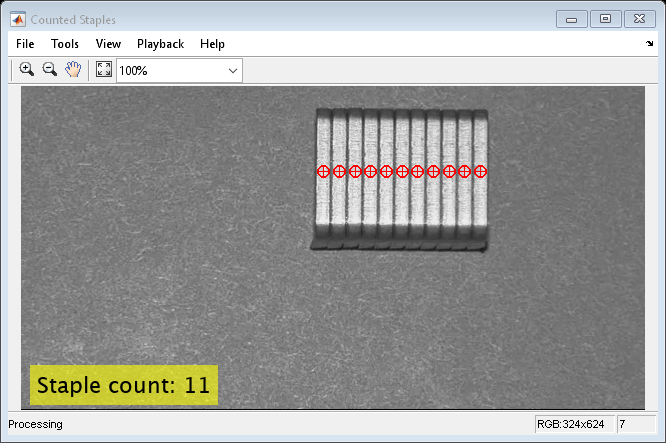
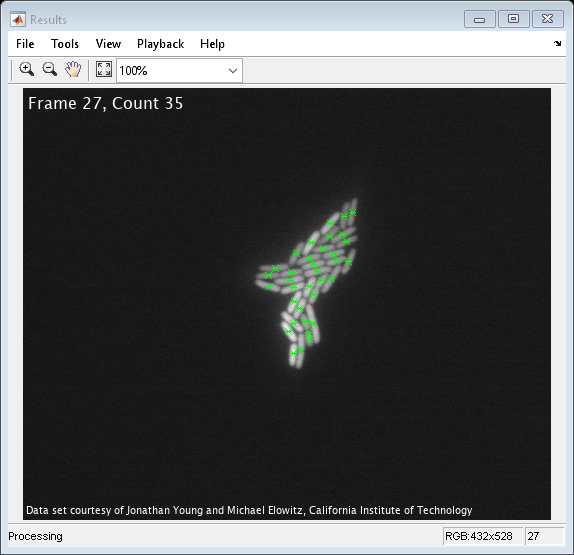
本地功能及其描述符是许多计算机视觉算法的构建块。它们的应用包括图像配准,对象检测和分类,跟踪,运动估计和基于内容的图像检索(CBIR)。这些算法使用本地特征来更好地处理尺度变化,旋转和闭塞。计算机Vision Toolbox™算法包括快速,哈里斯和史和Tomasi角探测器,以及冲浪,Kaze和MSER Blob探测器。工具箱包括冲浪,怪胎,快速,LBP,ORB和HOG描述符。您可以根据应用的要求混合和匹配探测器和描述符。
功能
话题
了解本地特征检测和提取的好处和应用
选择返回和接受点对象的函数,以获取多种类型的功能
指定像素索引,空间坐标和3-D坐标系
指定要绘制的形状类型时,还必须在图像上指定它的位置。
使用基于内容的图像检索(CBIR)系统,从类似于查询映像的图像的集合检索图像。
特色例子


您还可以从以下列表中选择一个网站:
