matchFeaturesInRadius
在指定的半径内找到匹配的特征
语法
描述
[还返回匹配对中特征之间的距离indexPairs,matchMetric= matchFeaturesInRadius(___)indexPairs.
[除以前语法中的输入参数外,还使用一个或多个名称-值参数指定选项。indexPairs,matchMetric= matchFeaturesInRadius(___,名称,值)
例子
匹配两张图像之间的特征
将包含图像和相机数据的MAT文件加载到工作区中。
数据=负载(“matchInRadiusData.mat”);
转换相机姿势到外部。
orientation = data.cameraPose2.Rotation;location = data.cameraPose2.Translation;[rotationMatrix,translationVector] = cameraPoseToExtrinsics(方向,位置);
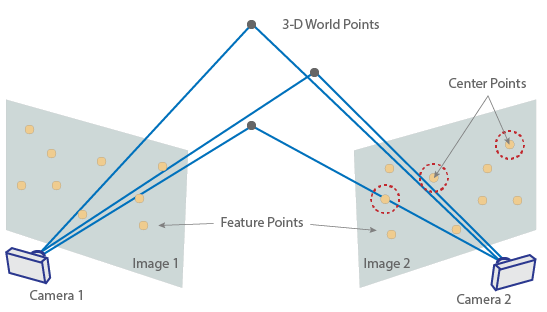
将与特征集1相关的3-D世界点投影到第二张图像上。
centerPoints = worldToImage(data.intrinsic,rotationMatrix,translationVector,data.worldPoints);
在空间约束下,匹配两个特征集之间的特征。
indexpair1 = matchFeaturesInRadius(data. featres1,data. featres2,...data.radius data.points2,中心,“MatchThreshold”,40,...“MaxRatio”, 0.9);
在不使用空间约束的情况下,在两个特征集之间匹配特征。
indexPairs2 = matchFeatures(data. featres1,data. featres2,...“MatchThreshold”,40,“MaxRatio”, 0.9);
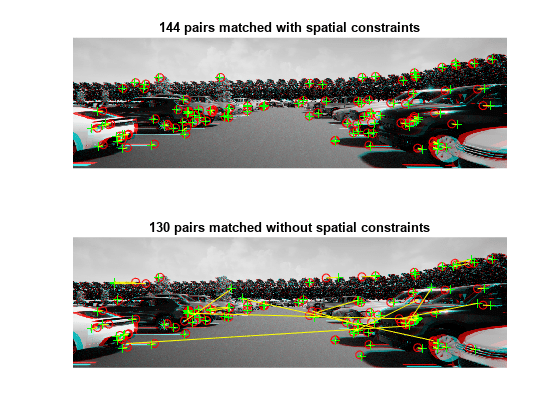
可视化并比较两种匹配特征的方法的结果。
showMatchedFeatures(data.I1,data.I2,data.points1(...indexPairs1 (: 1)), data.points2 (indexPairs1 (:, 2)));标题(sprintf ('%d对匹配空间约束'大小(indexPairs1 1)));次要情节(2,1,2)showMatchedFeatures (data.I1、data.I2 data.points1 (...indexPairs2 (: 1)), data.points2 (indexPairs2 (:, 2)));标题(sprintf ('%d对匹配没有空间限制'大小(indexPairs2 1)));
输入参数
features1- - - - - -特征集一
binaryFeatures对象|米1 -N矩阵
特征集1,指定为abinaryFeatures对象或米1 -N矩阵。矩阵包含米1特性,以及N对应于每个特征向量的长度。
您可以获取binaryFeatures对象使用extractFeatures函数采用快速视网膜关键点(FREAK)、定向快速旋转简要(ORB)或二进制鲁棒不变可伸缩关键点(BRISK)描述符方法。
数据类型:逻辑|int8|uint8|int16|uint16|int32|uint32|单|双|binaryFeature对象
features2- - - - - -特征集二
米2 -N矩阵|binaryFeatures对象
特征集2,指定为abinaryFeatures对象或米2 -N矩阵。矩阵包含米2特性,以及N对应于每个特征向量的长度。
您可以获取binaryFeatures对象使用extractFeatures函数采用快速视网膜关键点(FREAK)、定向快速旋转简要(ORB)或二进制鲁棒不变可伸缩关键点(BRISK)描述符方法。
数据类型:逻辑|int8|uint8|int16|uint16|int32|uint32|单|双|binaryFeature对象
points2- - - - - -特征集二的特征点
米2×2矩阵|米2元特征点数组
特征集2的特征点,指定为米2 × 2矩阵,格式为[xy]或米2元特征点数组。有关点特征类型的列表,请参见点特征类型.
数据类型:单|双|点特征类型
中心- - - - - -预期匹配位置
米1×2矩阵
第二张图像中与特征点对应的期望匹配位置features1,指定为米1 × 2坐标矩阵,格式为[xy].
数据类型:单|双
半径- - - - - -搜索与中心点相关的半径
标量|米1-element向量
与中心点相关联的搜索半径,指定为标量或米1-element向量。当您指定半径作为标量值,该函数对所有中心点使用相同的搜索半径。
数据类型:单|双
名称-值参数
指定可选参数对为Name1 = Value1,…,以=家,在那里的名字参数名称和价值对应的值。名称-值参数必须出现在其他参数之后,但对的顺序无关紧要。
在R2021a之前,使用逗号分隔每个名称和值,并将其括起来的名字在报价。
例子:“指标”,固态硬盘的指定特征匹配的差的平方和度量。
MatchThreshold- - - - - -匹配阈值
10.0或1.0(默认)|范围(0,100]中的标量值
匹配阈值,指定为范围(0,100)中的标量值。默认值为10.0对于二进制特征向量或1.0对于非二元特征向量。您可以使用匹配阈值来选择最强的匹配。阈值表示距离完美匹配距离的百分比。
当两个特征向量之间的距离小于由'设置的阈值时,它们就匹配了。MatchThreshold”。当特征之间的距离大于'值时,函数拒绝匹配。MatchThreshold”。增加该值以返回更多匹配项。
输入是binaryFeatures对象通常需要较大的匹配阈值。的extractFeatures函数返回binaryFeatures对象在提取FREAK、ORB或BRISK描述符时。
MaxRatio- - - - - -比率阈值
0.6(默认)|(0,1)范围内的标量值
比率阈值,指定为范围(0,1]中的标量值。使用比率来拒绝不明确的匹配。增加此值以返回更多匹配项。
度规- - - - - -特征匹配度量
固态硬盘的(默认)|“伤心”
特征匹配度量,指定为任意一个“伤心”或固态硬盘的.
“伤心” |
绝对差的和 |
固态硬盘的 |
差的平方和 |
此属性适用于指定输入特征集时,features1而且features2,作为矩阵。当您将特性指定为binaryFeatures对象,该函数使用汉明距离来计算相似度度量。
输出参数
matchMetric—匹配特征之间的距离
P1的向量
匹配特征之间的距离,返回为P1的向量。的我第Th元素matchMetric对应于我第Th行indexPairs输出矩阵。距离的值基于所选择的度量,但总是完全匹配的0.当度规设置为悲伤的或固态硬盘,计算前将特征向量归一化为单位向量。函数返回matchMetric作为一个双数据类型:features1而且features2类型双.否则,返回的向量为类型单.
请注意
你不能选择汉明度规。属性时自动选择度量features1而且features2输入binaryFeatures.
数据类型:单|双
提示
参考文献
frundorfer, Friedrich和Davide Scaramuzza。视觉里程计:第二部分:匹配,稳健性,优化和应用IEEE机器人与自动化杂志19日,没有。2(2012年6月):78-90。https://doi.org/10.1109/MRA.2012.2182810。
[2] Lowe, David G.“来自比例不变关键点的独特图像特征。”国际计算机视觉杂志60,不。2(十一月2004):91-110。https://doi.org/10.1023/B: VISI.0000029664.99615.94。
Muja, Marius和David G. Lowe。快速近似近邻与自动算法配置:在第四届计算机视觉理论与应用国际会议论文集, 331 - 40。葡萄牙里斯本:科学出版社-科学与技术出版物,2009。https://doi.org/10.5220/0001787803310340。
Muja, Marius和David G. Lowe。“二进制特征的快速匹配”在2012第九届计算机与机器人视觉会议, 404 - 10。纽约:电气和电子工程师协会,2012。https://doi.org/10.1109/CRV.2012.60。
扩展功能
版本历史
您也可以从以下列表中选择一个网站: