detectMSERFeatures
检测MSER功能并返回MSERRegions对象
描述
例子
在图像中找到MSER区域
读取图像并检测MSER区域。
我= imread('cameraman.tif');地区=侦听器(i);
可视化由存储在返回的“区域”对象内的像素列表描述的MSER区域。
数字;imshow(i);抓住在;情节(地区,'showpixellist',真的,“showEllipses”、假);

显示椭圆和圆心适合的区域。默认情况下,plot显示椭圆和圆心。
数字;imshow(i);抓住在;情节(地区);

查找循环MSER区域
检测MSER区域。
我= imread(“coins.png”);[地区,mserCC] = detectMSERFeatures(我);
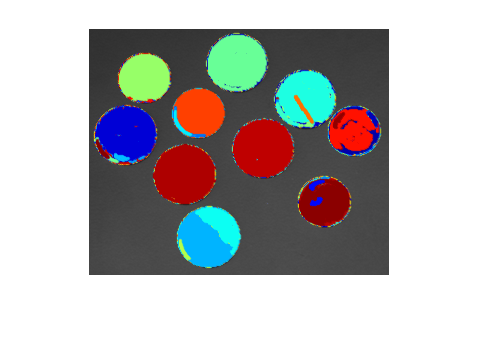
显示所有检测到的MSER区域。
图imshow(我)在情节(地区,'showpixellist',真的,“showEllipses”,错误的)
测量MSER区域偏心率以衡量区域圆形。
统计= regionprops ('桌子'mserCC,'偏心');
阈值偏心值仅保持圆形区域。(圆形区域偏心率低。)
eccentricityIdx =统计数据。离心率< 0.55;circularRegions =区域(eccentricityIdx);
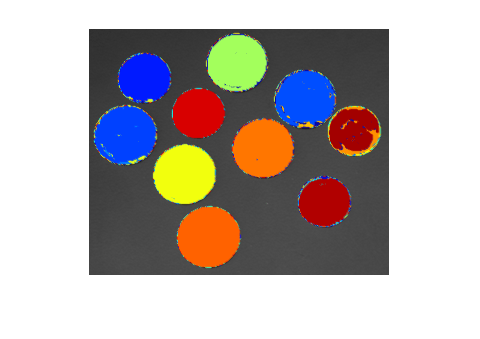
显示圆形区域。
图imshow(我)在情节(循环,'showpixellist',真的,“showEllipses”,错误的)
输入参数
输出参数
算法
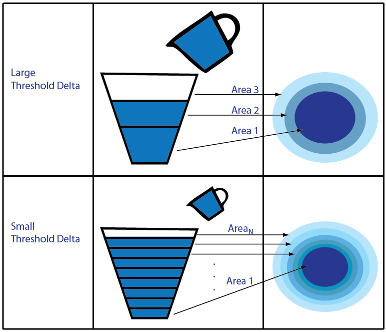
强度阈值水平
MSER检测器通过输入图像的强度范围递增地递增,以检测稳定区域。这ThresholdDelta参数确定递增仪稳定性的递增次数。您可以将阈值三角形值视为杯子的尺寸,以填充水桶。杯子越小,填充桶所需的增量数量越多。铲斗可以被认为是该区域的强度剖面。
MSER对象检查不同强度阈值之间的区域区域大小的变化。变异必须小于该值MaxAreaVariation参数被认为稳定。
请注意
MSER功能检测不适用于具有极端强度值的图像中的图像。
在高水平上,MSER可以通过考虑代表一系列桶的图像的强度分布来解释。想象一下,桶的顶部与地面齐平,其中一个桶的水管打开了。当水装满桶时,它溢出来,下一个桶也开始装满水。更小的水区域连接成更大的水体,最终整个区域被填满。当水进入水桶时,要根据MSER稳定性准则进行检查。不同强度阈值的区域出现、增长和合并。
参考文献
[1] Nister,D.和H. Stewenius,“线性时间最大稳定的极值区域”,计算机科学课堂讲稿。计算机视觉学报,2008年第4期。5303年,页183 - 196。
Matas J., O. Chum, M. Urba, T. Pajdla。来自最大稳定极值区域的稳健宽基线立体声英国机器视觉会议论文集, 2002年384-396页。
[3] Obdrzalek D.,S. Basovnik,L. Mach和A. Mikulik。“检测使用最大稳定的颜色区域的场景元素”计算机与信息科学通讯,法国La Fertce-Bernard;2009年,卷。82 CCIS(2010年12 01),PP 107-115。
[4] Mikolajczyk,K.,T.Tuytelaars,C.Schmid,A.Zisserman,T. Kadir和L. Van Gool,“仿射区探测器的比较”;计算机视觉学报,2005年11月,pp . 43-72。
扩展功能
另请参阅
功能
detectBRISKFeatures|detectFASTFeatures|detectFASTFeatures|探测器法|检察官化|detectMinEigenFeatures|探测拍摄|提取物质|extractHOGFeatures|matchfeatures.
对象
您还可以从以下列表中选择一个网站:
