文档帮助中心文档
来自运动的结构(SfM)是从一组二维图像中估计场景的三维结构的过程。有关详细信息,请参见视觉大满贯概述.
全部展开
detectBRISKFeatures
BRISKPoints
detectFASTFeatures
cornerPoints
detectHarrisFeatures
detectMinEigenFeatures
detectMSERFeatures
MSERRegions
detectSURFFeatures
SURFPoints
extractFeatures
matchFeatures
matchFeaturesInRadius
愿景。PointTracker
imageviewset
worldpointset
cameraIntrinsics
rigid3d
affine3d
estimateEssentialMatrix
estimateFundamentalMatrix
estimateWorldCameraPose
relativeCameraPose
pointTrack
findTracks
由三角形组成的
triangulateMultiview
bundleAdjustment
bundleAdjustmentMotion
bundleAdjustmentStructure
stereoAnaglyph
pcshow
plotCamera
showMatchedFeatures
rotationMatrixToVector
rotationVectorToMatrix
单摄像头校准应用
估计相机的内在,外在,和镜头畸变参数。
立体相机校准应用
校准立体相机,你可以用它来从图像中恢复深度。
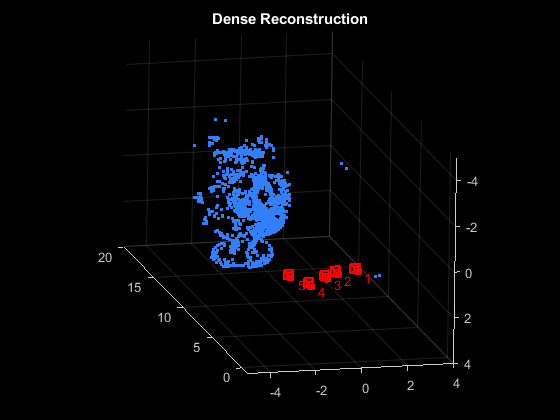
单眼视觉测程法
通过分析图像序列来确定相机的位置和方向。
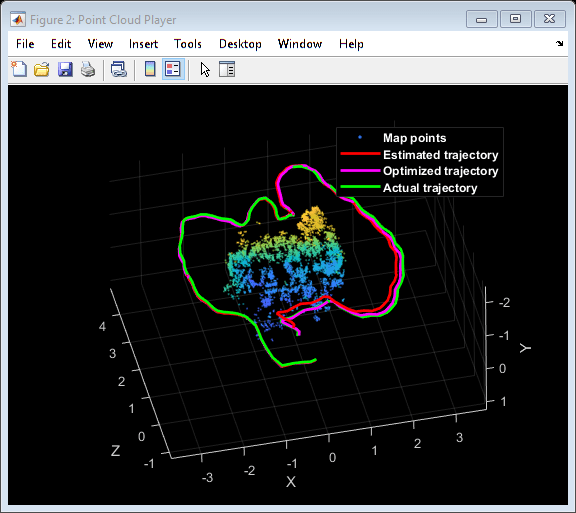
单目视觉同步定位与绘图
视觉同步定位和绘图(vSLAM)。
坐标系统
指定像素索引、空间坐标和三维坐标系统
点特征类型
为几种类型的特性选择返回和接受点对象的函数
局部特征检测与提取
学习局部特征检测和提取的好处和应用
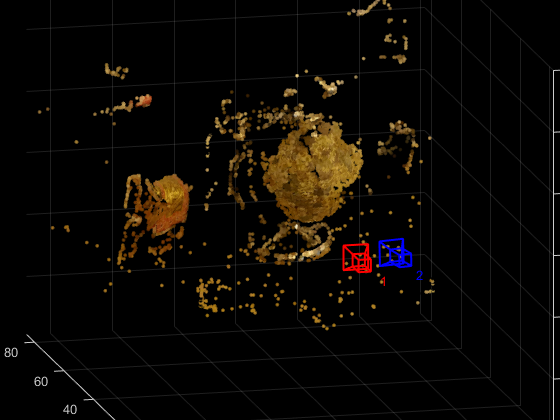
运动结构概述
从二维图像序列估计三维结构
视觉大满贯概述
理解视觉同步定位和绘图(SLAM)工作流程。
来自运动的结构(SfM)是从一组2-D视图估计场景的3-D结构的过程。它被用于许多应用,如机器人导航、自动驾驶和增强现实。这个例子向您展示了如何从一系列视图中估计校准相机的姿态,并重建场景的3-D结构,直到未知的比例因子。
从一组2-D图像估计场景的3-D结构。
你点击一个链接对应于这个MATLAB命令:
通过在MATLAB命令窗口中输入命令来运行命令。Web浏览器不支持MATLAB命令。金宝app
选择一个网站,在那里获得翻译的内容,并看到当地的活动和优惠。根据您的位置,我们建议您选择:.
你也可以从以下列表中选择一个网站:
选择中国网站(中文或英文)以获得最佳网站性能。其他MathWorks国家站点没有针对您所在位置的访问进行优化。
与当地办事处联系