Vision.PointCracker.
利用kade - lucas - tomasi (KLT)算法跟踪视频点
描述
点跟踪器对象使用Kanade-Lucas-Tomasi(KLT),特征跟踪算法跟踪一组点。您可以使用点跟踪器进行视频稳定,相机运动估计和对象跟踪。它尤其适用于跟踪不改变形状的物体以及展示视觉纹理的物体。点跟踪器通常用于短期跟踪,作为更大的跟踪框架的一部分。
随着点跟踪算法的发展,点可能会由于光照变化、平面旋转或关节运动而丢失。要在很长一段时间内跟踪一个对象,可能需要周期性地重新获取点。
跟踪一组点:
创建
Vision.PointCracker.对象,并设置其属性。使用参数调用对象,就像调用函数一样。
要了解更多关于System对象如何工作的信息,请参见什么是系统对象?.
创建
描述
pointtracker = Vision.PointCracker.返回一个点跟踪器对象,用于跟踪视频中的一组点。
PointTracker.=愿景。PointTracker (名称,值)pointTracker = vision.PointTracker (NumPyramidLevels, 3)
初始化跟踪过程:
要初始化跟踪过程,必须使用初始化指定点的初始位置和初始视频帧。
初始化(pointTracker点,我)初始化要跟踪的点并设置初始视频帧。最初的位置点,一定是米[x y]坐标的-by-2数组。初始视频帧,我,必须是二维灰度或RGB图像,并且必须与传递给该的视频帧的大小和数据类型相同一步方法。
的检测到空间,探测拍摄,detectHarrisFeatures, 和detectMinEigenFeatures函数是获取跟踪初始点的许多方法中的少数几种。
属性
除非另有说明,属性是nontunable,这意味着您不能在调用对象之后更改它们的值。对象在调用时锁定,而释放功能解锁它们。
如果一个属性是可调,您可以随时更改它的值。
有关更改属性值的更多信息,请参见在MATLAB中使用系统对象进行系统设计.
numpyramidlevels.- - - - - -金字塔层数
整数(默认)|3.
金字塔层数,指定为整数。KLT算法的点跟踪器实现使用图像金字塔。跟踪器生成一个图像金字塔,其中每一层的分辨率比前一层降低了两倍。选择一个大于1的金字塔级别,使算法能够跟踪多个分辨率级别的点,从最低级别开始。增加金字塔水平的数量允许算法处理较大的位移之间的帧。然而,计算成本也会增加。推荐值为1和4.

每一层金字塔都是通过对前一层的宽度和高度进行因子2的向下采样而形成的。点跟踪器从最低分辨率的每一个点开始跟踪,一直跟踪到收敛为止。对象将这一层的结果传播到下一层,作为点位置的初始猜测。这样,跟踪随着每一层而细化,直到原始图像。使用金字塔层次允许点跟踪器处理大像素运动,这可能包括大于邻域大小的距离。
maxbidirectionalerror.- - - - - -前后错误阈值
INF.(默认)|标量
前向向后错误阈值,指定为标量。如果将值设置为小于INF.,跟踪器跟踪从上一帧到当前帧的每个点。然后跟踪相同的点回到前一帧。对象计算双向错误。这个值是点的原始位置到反向跟踪后的最终位置的距离,以像素为单位。当错误大于此属性设置的值时,将认为相应的点无效。推荐值为0和3.像素。
使用双向误差是消除无法可靠跟踪的点的有效方法。但是,双向误差需要额外的计算。当你设置时maxbidirectionalerror.财产INF.,对象不会计算双向错误。
![]()
blocksize- - - - - -附近的大小
(31日31日)(默认)|双元素矢量
被跟踪的每个点周围的邻域的大小,指定为两个元素向量,[高度,宽度].的高度和宽度必须是奇数。这个邻域定义了空间梯度矩阵计算的区域。最小值blocksize是(5个5].增加邻域的大小,增加计算时间。
MaxIterations- - - - - -最大搜索迭代次数
30.(默认)|整数
每个点的最大搜索迭代次数,指定为整数。KLT算法对每个点的新位置执行迭代搜索,直到收敛。通常,该算法在10次迭代中收敛。此属性设置搜索迭代次数的限制。推荐值为10和50.
使用
语法
描述
[跟踪输入帧中的点,点,point_validity) = pointTracker (我)我.
[此外,返回每个点的信心分数。点,point_validity,得分) = pointTracker (我)
setPoints(PointTracker,设置跟踪点。函数将米2点)点[xy]与追踪点的坐标。如果需要重新检测点,则可以使用此功能,因为在跟踪期间丢失了太多时,太多丢失了。
setPoints(PointTracker,另外,允许您标记点为有效或无效。输入逻辑向量点,point_validity)point_validity的长度米,包含与要跟踪的点的有效性相对应的真值或假值。长度米对应于点的个数。假值表示不应该跟踪的无效点。例如,可以使用这个函数estimateGeometricTransform函数来确定先前和当前帧中的点位置之间的变换。您可以将异常值标记为无效。
输入参数
输出参数
对象的功能
要使用对象功能,请将System Object™指定为第一个输入参数。例如,要发布命名的系统对象的系统资源obj,使用此语法:
发行版(obj)
例子
在场景中跟踪人脸
创建系统对象以读取和显示视频,并绘制对象的边界框。
videoReader = videoReader ('Visionface.avi');放像机=愿景。放像机('位置',[100,100,680,520]);
读取第一个视频帧,其中包含对象,定义区域。
objectFrame = readFrame (videoReader);objectRegion =(264122、93、93);
作为一种替代方法,您可以使用以下命令使用鼠标选择对象区域。物体必须占据区域的大部分:
图;imshow (objectFrame);
objectRegion =圆(getPosition (imrect))
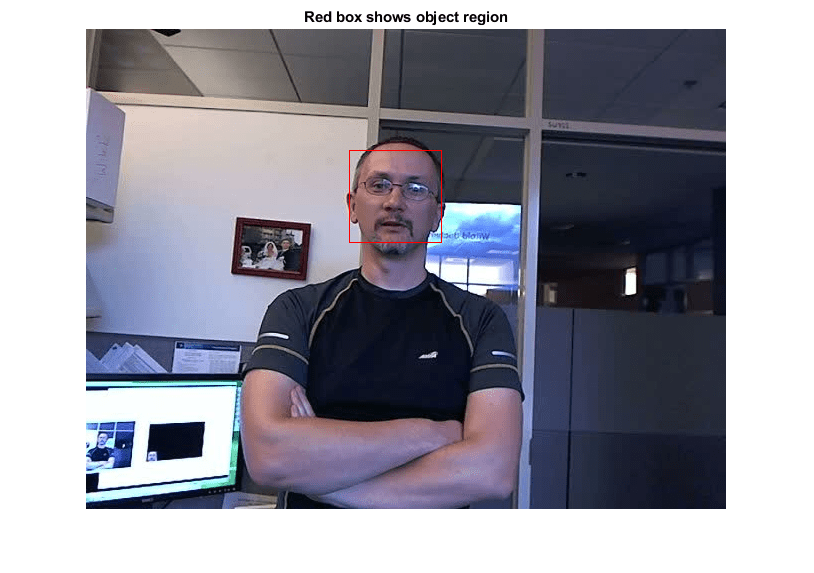
显示带有红色边框的初始帧。
objectImage = insertShape (objectFrame,'矩形',ObjectRegion,'颜色',“红色”);图;imshow (objectImage);标题('红色框显示对象区域');
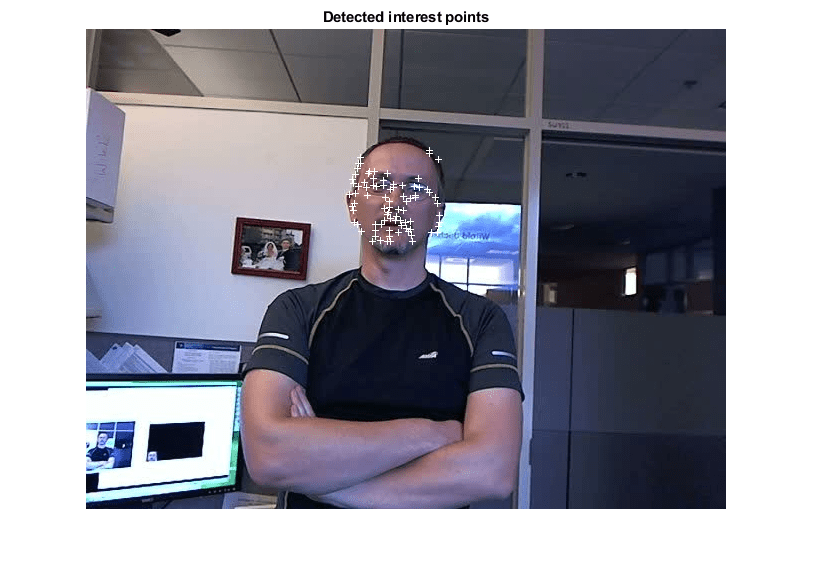
检测目标区域的兴趣点。
点= detectMinEigenFeatures (im2gray (objectFrame),“投资回报”, objectRegion);
显示检测到的点。
pointImage = insertMarker (objectFrame点。的位置,'+','颜色',“白色”);图;imshow (pointImage);标题(“检测兴趣点”);
创建一个跟踪器对象。
Tracker = Vision.PointCracker('maxbidirectionalerror'1);
初始化跟踪。
初始化(跟踪、points.Location objectFrame);
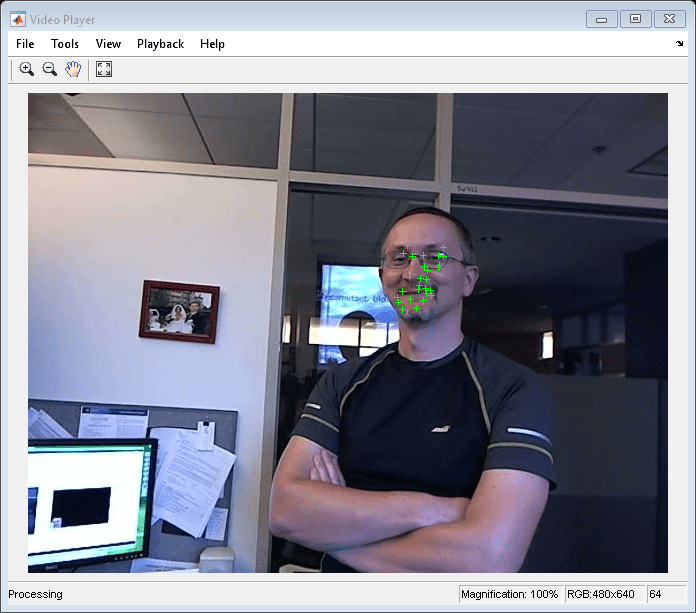
在每个视频帧中读取、跟踪、显示点和结果。
尽管hasFrame(videoReader) frame = readFrame(videoReader);(点,有效性)=追踪(框架);out = insertMarker(frame,points(validity,:)),'+');放像机(出);结束
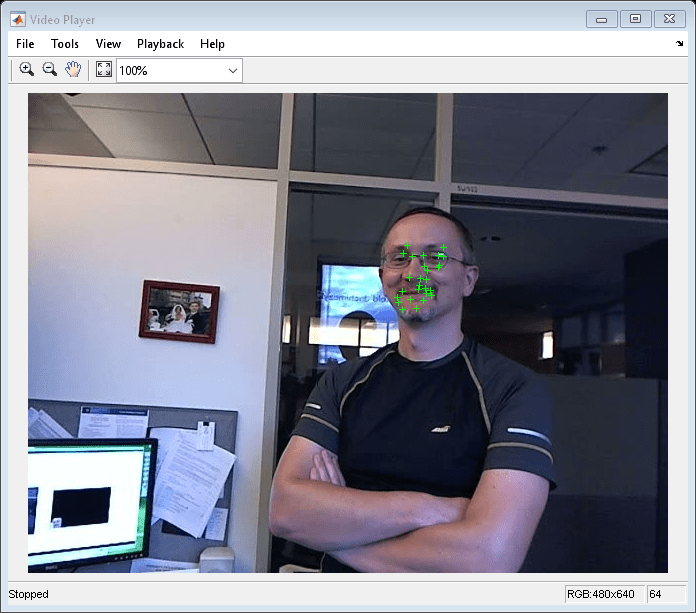
释放视频播放器。
释放(Videoplayer);
参考
[1] Lucas,Bruce D.和Takeo Kanade。“一种迭代图像配准技术,具有立体视觉的应用程序,”第七届国际人工智能联合会议论文集, 1981年4月,第674-679页。
[2] Tomasi,Carlo和Takeo Kanade。点特征检测与跟踪1991年4月,卡耐基梅隆大学计算机科学系。
[3]史,建博和卡洛汤姆西。“追踪的好功能,”IEEE计算机愿景和模式识别, 1994,第593-600页。
[4] Kalal,Zdenek,Krystian Mikolajczyk和Jiri Matas。“前后错误:自动检测跟踪故障,”第20届国际模式识别国际会议的诉讼程序,2010年,2010年第2756-2759页。
扩展功能
另请参阅
detectHarrisFeatures|detectMinEigenFeatures|探测拍摄|estimateGeometricTransform|imrect|InsertMarker.|愿景。HistogramBasedTracker
您还可以从以下列表中选择一个网站:
