主要内容
跟踪和运动估计
光学流动,活动识别,运动估计和跟踪
运动估计和跟踪是许多计算机视觉应用中的关键活动,包括活动识别,交通监控,汽车安全和监视。
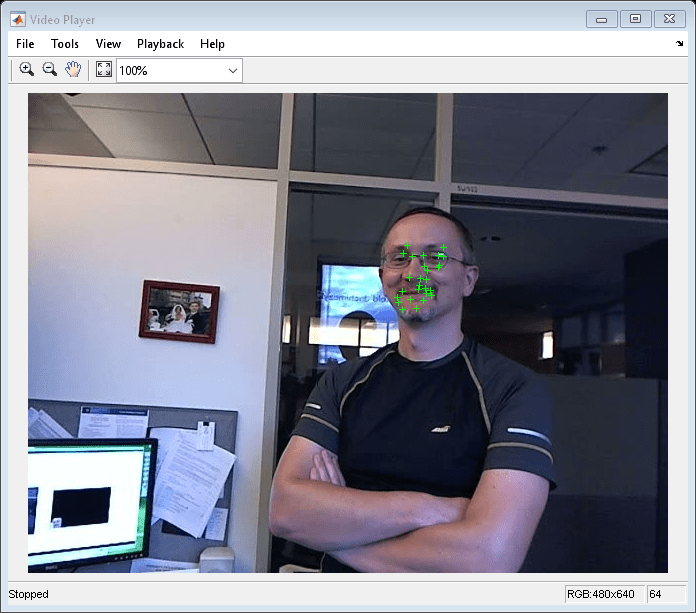
计算机Vision Toolbox™提供视频跟踪算法,例如连续自适应平均换档(CAPShift)和Kanade-Lucas-Tomasi(KLT)。您可以使用这些算法来跟踪单个对象或在更复杂的跟踪系统中作为构建块。该工具箱还提供了包含包含的多个对象跟踪的框架卡尔曼过滤和匈牙利算法分配对象检测到跟踪。
运动估计数是确定相邻视频帧之间的块的移动的过程。该工具箱包括运动估计算法,例如光流量,块匹配和模板匹配。这些算法创建运动向量,其可以与整个图像,块,任意斑块或单个像素相关。对于块和模板匹配,查找最佳匹配的评估度量包括均方误差(MSE),平均绝对偏差(MAD),最大绝对差(MAXAD),绝对差异(SAD)和平方差和和平方和平方和总和(SSD)。
职能
话题
追踪是在视频流中定位移动对象或多个对象的过程。
特色例子
您还可以从以下列表中选择一个网站:
