主要内容
plotCamera
在三维坐标中绘制一个摄像机
描述
例子
使用绝对姿势的情节动画摄像机
创建一个rigid3d对象。
R = [1 0 0;0 0 -1;0 0 -1;T = [10 0 20];构成= rigid3d (R, t);
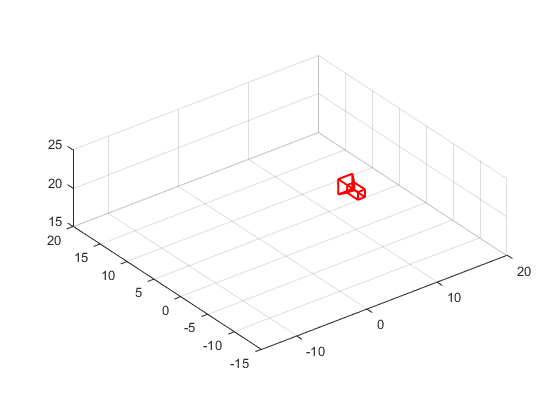
绘制一个不透明度为0的相机,并根据创建的绝对姿态rigid3d对象。
凸轮= plotCamera (“AbsolutePose”姿势,“不透明度”, 0)
cam = Camera with properties: Parent: [1x1 Axes] Size: 1 AbsolutePose: [1x1 rigid3d] Visible: 1 AxesVisible: 0 ButtonDownFcn: " Color: [1 0 0] Opacity: 0 Label: "
设置当前轴的查看属性。
网格在轴平等的轴手册
扩展每个轴的可视限制。这些更改使整个动画在下一步中可见。
xlim (20 [-15]);ylim (20 [-15]);zlim (25 [15]);
旋转摄像机y设在。
为= 0: /64:10* T = [cos 0sin;0 10;-sin 0cos];凸轮。AbsolutePose = rigid3d(T * R, [10 * cos(theta), 10 * sin(theta), 20]);drawnow ();结束
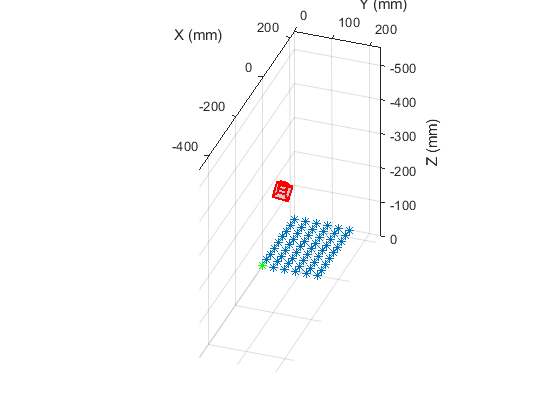
可视化相机外在
创建一组校准图像。
图像= imageSet (fullfile (toolboxdir (“愿景”),“visiondata”,“校准”,“单反”));
检测图像中的棋盘角。
[imagePoints, boardSize] = detectCheckerboardPoints (images.ImageLocation);
在以模式为中心的坐标系中生成棋盘角的世界坐标,左上角为(0,0)。设置方形尺寸为29毫米。
squareSize = 29;worldPoints = generateCheckerboardPoints (boardSize squareSize);
校准相机。
cameraParams = estimateCameraParameters (imagePoints worldPoints);
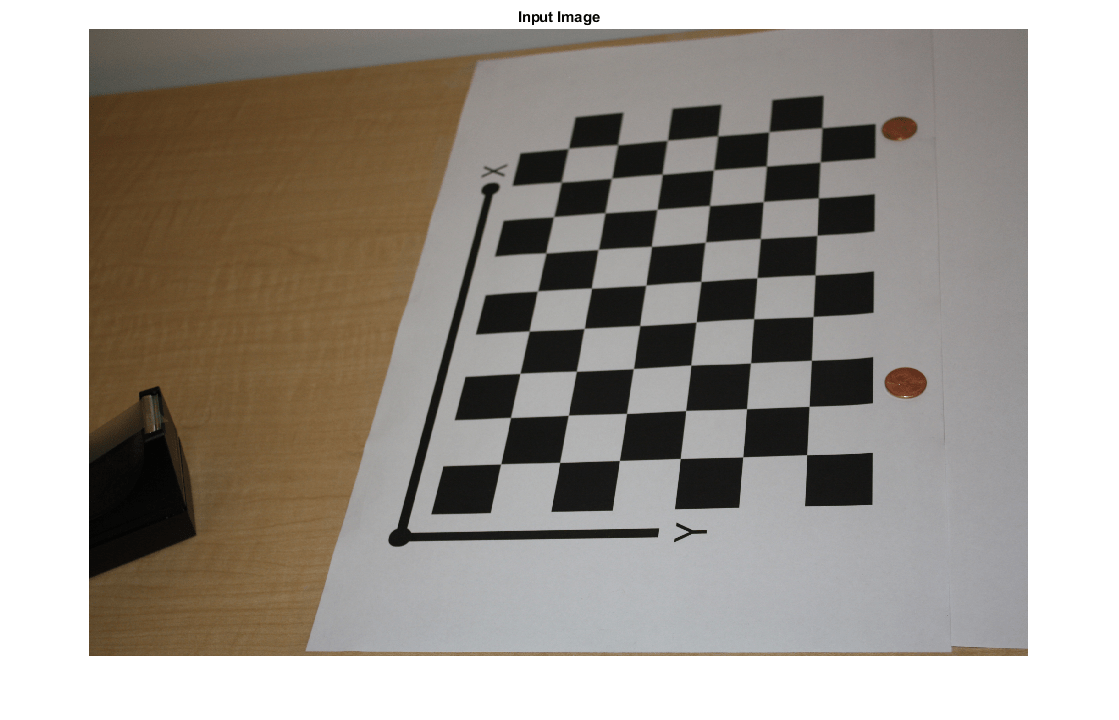
在新位置加载图像。
imOrig = imread (fullfile (toolboxdir (“愿景”),“visiondata”,“校准”,“单反”,“image9.jpg”));图;imshow (imOrig“InitialMagnification”, 50);标题(输入图像的);
Undistort图像。
我= undistortImage (imOrig cameraParams);
在新图像中找到参考对象。
[imagePoints, boardSize] = detectCheckerboardPoints (im);
计算新的extrinsics。
[rotationMatrix, translationVector] =外在(imagePoints、worldPoints cameraParams);
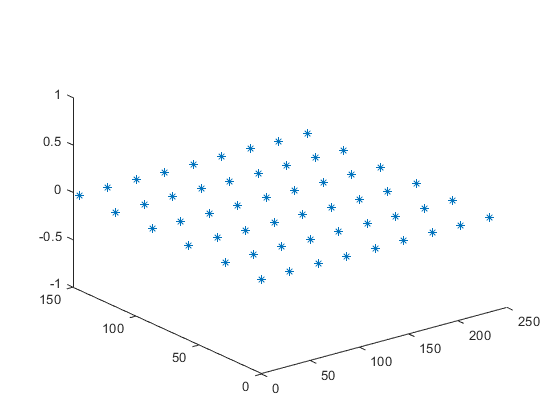
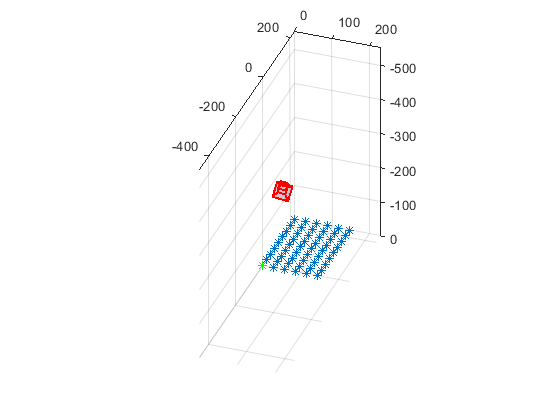
画出世界点。
图;plot3 (worldPoints (: 1) worldPoints(:, 2), 0(大小(worldPoints, 1), 1),‘*’);持有在
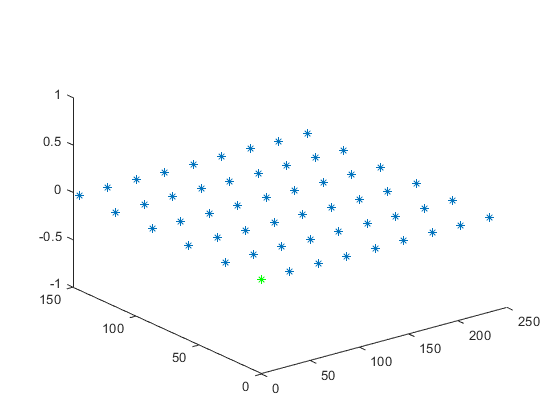
马克原点。
plot3 (0, 0, 0,“g *”);
计算相机的位置和方向。
取向= rotationMatrix ';location = -translationVector *方向;
绘制相机。
absPose = rigid3d(方向、位置);凸轮= plotCamera (“AbsolutePose”absPose,“大小”, 20);
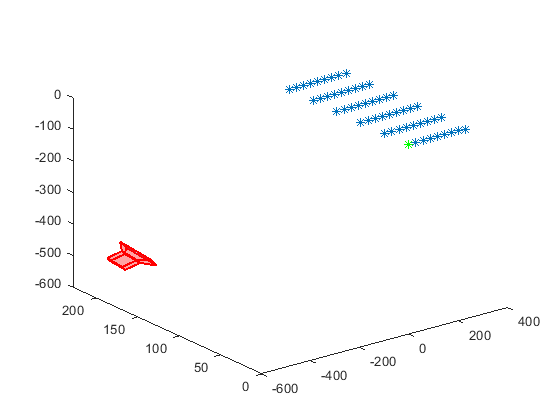
使z设在点下来。
集(gca),“CameraUpVector”, 0 0 1);
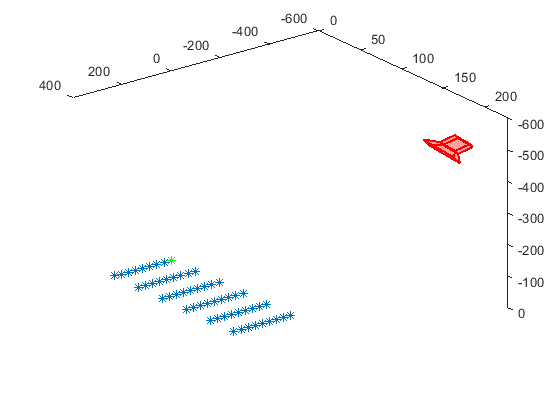
设置视图参数。
camorbit (gca, -110, 60岁,“数据”, 0 0 1);轴平等的网格在
开启三维旋转。
cameratoolbar (“SetMode”,“轨道”);
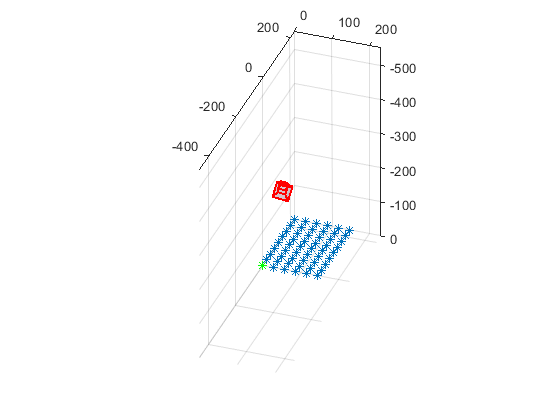
标签的轴。
包含(“X(毫米));ylabel (“Y”(毫米));zlabel (“Z (mm)”);
输入参数
输出参数
介绍了R2015a
你也可以从以下列表中选择一个网站:
